
يقول المؤلف المشارك Kohei Nakajima ، عالم الرياضيات التطبيقية في جامعة طوكيو في اليابان: "في الأساس ، يدور عملنا حول كيفية تصميم سلوك التبديل التلقائي باستخدام الديناميكيات الفوضوية". عادةً ما يصمم المهندسون روبوتًا يمشي ويركض ، ويمكن للمُجرِّب بعد ذلك استخدام وحدة تحكم خارجية يدوية لتبديل هذه "السلوكيات". ولكن من أجل القفز من مثل هذه البيئة الخاضعة للرقابة إلى بيئة يستطيع فيها الروبوت تغيير السلوك بشكل مستقل ، سعى الباحثون لمحاكاة الحركة الفوضوية. غالبًا ما يُرى في دماغ الحيوانات والأنظمة الديناميكية الأخرى ، يحدث التوجيه الفوضوي عندما ينتقل النظام بشكل غير متوقع ولكن بشكل حاسم بين عدة أنماط نمطية ، سواء كان ذلك المشي أو الجري أو أي شكل آخر من أشكال السلوك.

الخبرات الماضية
قال المؤلف الرئيسي كاتسوما إينو ، وهو طالب دراسات عليا في جامعة طوكيو ، إن الروبوتات سعت إلى محاكاة الحركة الفوضوية في الماضي. صنع روبوت واحد ، تم إنشاؤه في عام 2006 ، نموذجًا لرضيع بشري بنظام حسي جسدي ومئات من المحركات تمثل عضلات الجسم ، كل منها متصل بعدة مذبذبات فوضوية - المكافئ الخام للخلايا العصبية الحركية. تتفاعل الأنظمة الحسية الجسدية مع المذبذبات الفوضوية ، والتي تشير بعد ذلك إلى حركة "العضلات". تم تصميم النظام لتقليد التطور المبكر للمهارات الحركية البشرية ، وأعاد إنتاج حركات تشبه الفوضى من خلال تبديل العديد من السلوكيات النمطية ، بما في ذلك الزحف والتدحرج.
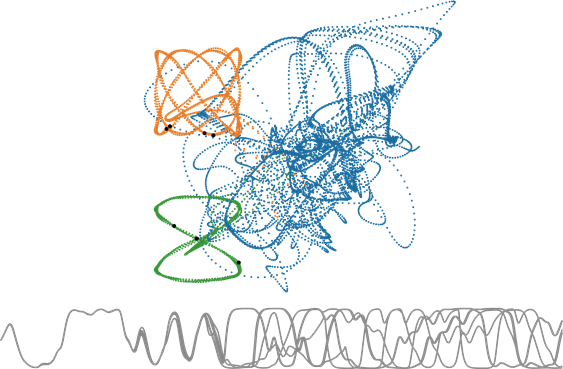
تمثل الأشكال الزرقاء والبرتقالية والخضراء في هذه الصورة سلوكيات مختلفة صممها المؤلفون لدماغ الروبوت للتبديل بينها بشكل مستقل. للقيام بذلك ، ابتكر الباحثون سمات ظاهرة تسمى الحركة الفوضوية. صورة من حديث "تصميم التحول السلوكي العفوي عبر التجوال الفوضوي" (كاتسوما إينو ، كوهي ناكاجيما وياسو كونيوشي).
ركزت أبحاث أخرى على تطوير سلوك التبديل التلقائي في الروبوتات باستخدام بنية هرمية مع شبكة عصبية ذات مستوى أعلى تقود وحدات ذات مستوى أدنى تتوافق مع كل نوع من أنواع السلوك. ومع ذلك ، وفقًا لكوهي ناكاجيما ، تستغرق عملية التعلم الكثير من الوقت في هذه التجارب.
كيف يكون النظام فريدًا؟
للتغلب على هذه المشاكل ، لم يستخدم الباحثون اليابانيون التصميم الهرمي. بدلاً من ذلك ، في طريقة من ثلاث خطوات باستخدام إطار عمل للتعلم الآلي ، حدد الباحثون أولاً عدة سلوكيات محتملة ودربوا الشبكة العصبية على إعادة إنتاجها وفقًا للأوامر. ثم قام الباحثون بتدريب الشبكة على التبديل بين هذه السلوكيات بترتيب معين ، وأخيراً طوروا انتقالات احتمالية بين هذه السلوكيات باستخدام ديناميكيات فوضوية. وكانت النتيجة نظامًا يتميز بحركة فوضوية.

(A) , . : - (ESN) ESN. ESN ESN, , ESN . ESN - , ESN ESN , 0. (B) . . , . , , CI. , . 1 , . 2 3 . 2 3.
ماذا سيحدث بعد؟
الفكرة الرئيسية للبحث هي إنشاء طريقة أبسط وأكثر أناقة لإدراك الحركة التلقائية ، على غرار تلك التي لدى الحيوانات. ومع ذلك ، فقد اقتصر تنفيذ هذه الدراسة حتى الآن على شبكة عصبية على جهاز كمبيوتر. يخطط الباحثون الآن للانتقال من أجهزة الكمبيوتر إلى الروبوتات المادية على أمل إنشاء آلات تتصرف بشكل مستقل وعفوي في النهاية.
السمة المميزة للدماغ البشري ، مرونة العقل تسمح للناس باكتساب معرفة جديدة دون تدمير الذكريات القديمة. يرى العلماء هذا البحث كخطوة نحو إنشاء دماغ اصطناعي يمكن أن يكون له ذاكرة يمكنها التفاعل مع البيئة من خلال جسم اصطناعي.
قائمة المراجع:
- Adam Smith. AI with “spontaneous” behaviour like animals developed [ ]. URL: www.independent.co.uk/life-style/gadgets-and-tech/scientists-ai-spontaneous-behaviour-animals-b1762407.html
- Amy MacDermott. New technique builds animal brain–like spontaneity into AI [ ]. URL: blog.pnas.org/2020/11/new-technique-builds-animal-brain-like-spontaneity-into-ai
- : Katsuma Inoue, Kohei Nakajima, Yasuo Kuniyoshi. Designing spontaneous behavioral switching via chaotic itinerancy [ ]. URL: advances.sciencemag.org/content/advances/6/46/eabb3989.full.pdf