
(Betaflight 4.1 ، لم أقم بتصويره في الإعدادات الجديدة بعد)
المقالة الأخيرة - من الأرض إلى FPV Quadrocopter: مقدمة في
اليوم الآخر ، قررت الترقية إلى Betaflight 4.2 وينصح الجميع من حولي بتمكين التصفية باستخدام DShot ثنائي الاتجاه. بالمناسبة ، كان في 4.1.
أولاً ، دعنا نفهم قليلاً ما هو التصفية وسبب الحاجة إليه.
بشكل افتراضي ، يوفر Betaflight إعدادات التصفية العامة المناسبة لمعظم النماذج. ولكن لتحقيق أفضل أداء ، يمكن تعديل التصفية بشكل مختلف ، فقد تكون مبالغة أو غير كافية لطائرة بدون طيار.
جيروسكوب ممس
تحتوي كل طائرة كوادكوبتر على جهاز تحكم في الطيران - FC ، وهو في الأساس دماغ. تحتوي وحدات التحكم هذه أيضًا على شريحة رقمية ، والتي غالبًا ما تسمى الجيروسكوب. إنه جهاز استشعار يستشعر الحركة. يحتوي على جهاز كهروميكانيكي صغير يسمى MEMS (النظام الكهروميكانيكي الصغير).
يوجد "مقابس" ذات صدى ميكانيكي داخل هذا الجهاز. تقع هذه المقابس على جميع المحاور الثلاثة (الملعب ، اللفة ، الانحراف) والحركة (الجزء الميكانيكي) تخلق تقلبات الجهد (الجزء الكهربائي).
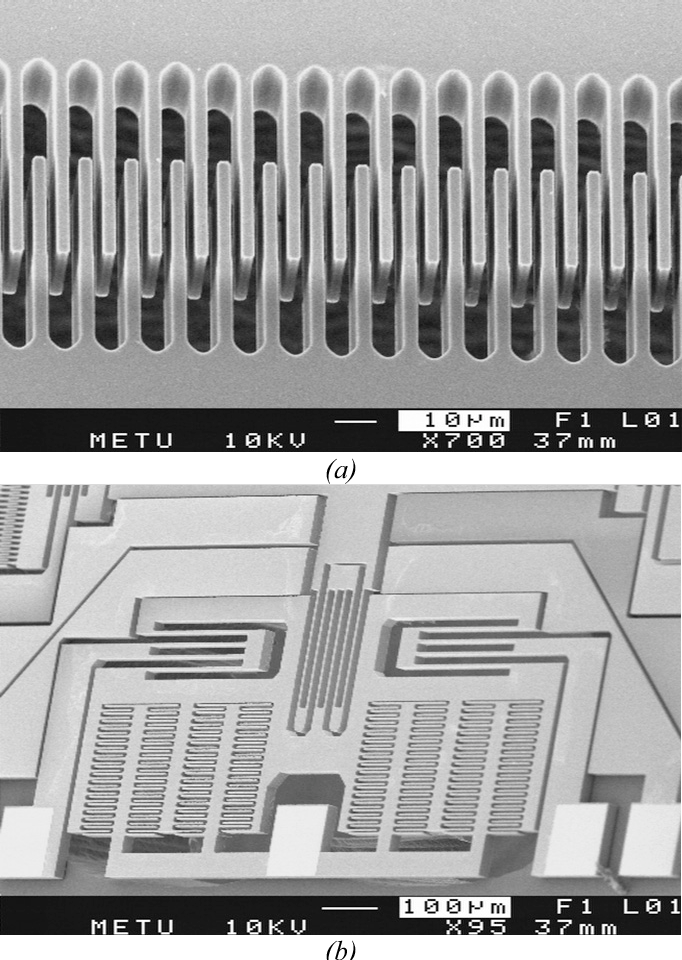
تقلبات الجهد (التقلبات) هي في الواقع موجات تناظرية يتم تحويلها إلى معلومات رقمية للمعالجة بواسطة جهاز التحكم في الطيران. عندما نقول 8k gyro ، فهذا يعني أنه يتم تحويل الإشارة التناظرية إلى 8000 مرة في الثانية إلى رقمية ويتم معالجتها بواسطة وحدة التحكم ، البرامج الثابتة ، في هذه الحالة Betaflight.
الضوضاء
الضجيج هو مصطلح نسمعه كثيرًا ، ولكن ما هو؟ كقاعدة ، نتخيل على الفور ضوضاء الصوت أو البيئة الصاخبة في النمل القادم المكون من 23 طابقًا.
يواجه الجيروسكوب وجهاز التحكم PID مشكلة مماثلة. نظرًا لأن الجيروسكوب يقع على جهاز التحكم في الطيران ، المرتبط بالإطار ، فإنه يواجه ضجيجًا. يمكن أن تأتي الضوضاء من: المحركات والمراوح وسرعة الرياح وضجيج الإطار العام والإلكترونيات وما إلى ذلك.
تحكم PID
وحدة التحكم PID هي نظام يضبط موضع quadcopter وفقًا للعصي (تحكمك) أو موضع معين (جيدًا ، مهما كان). يتم ضبط PID بواسطة 3 معلمات - P و I و D. لسوء الحظ ، في هذه المقالة لن نعتبر ضبط PID بالتفصيل. إذا كنت طيارًا ، فأنت تعلم بالفعل ، وإذا كنت مبتدئًا ، فستكون هناك مقالة منفصلة حول هذا الموضوع.
يعمل هذا النظام بشكل جيد عندما تكون كمية الضوضاء منخفضة ، وإلا فقد نواجه مشاكل مثل التذبذب (الاهتزاز) أو ارتفاع درجة حرارة المحركات.
يرتبط المصطلح d في وحدة تحكم PID بشكل خاص بالضوضاء. يعمل D على تنعيم الحركات السريعة ، ولكن حساب D في وحدة تحكم PID يزيد بشكل كبير من الضوضاء في الإشارة. وهذا يعني أن الضوضاء من جيروسكوب يتم تضخيمه بشكل كبير من قيمة D المدى، وبالتالي فإننا يتم تصفية في مكانين - الجيروسكوب وD.
وكمثال على هذه الزيادة، وسوف تظهر لك سجلات التالية:
الرسم البياني الأول - جيروسكوب
الرسم البياني الثاني - PID
ثالثا - المحركات
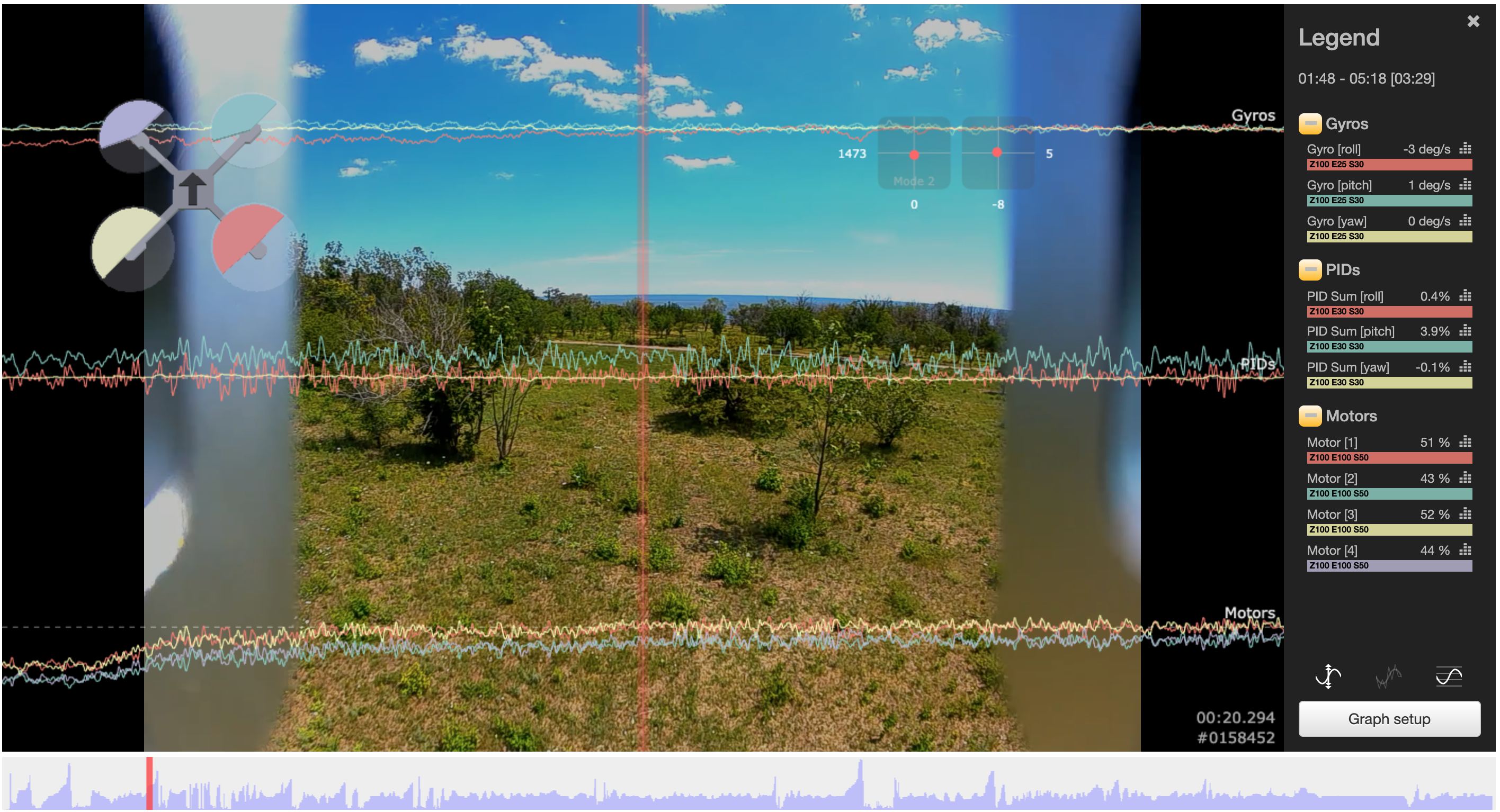
(هذه هي مراوح عادية ، مع تصفية منخفضة قليلاً)
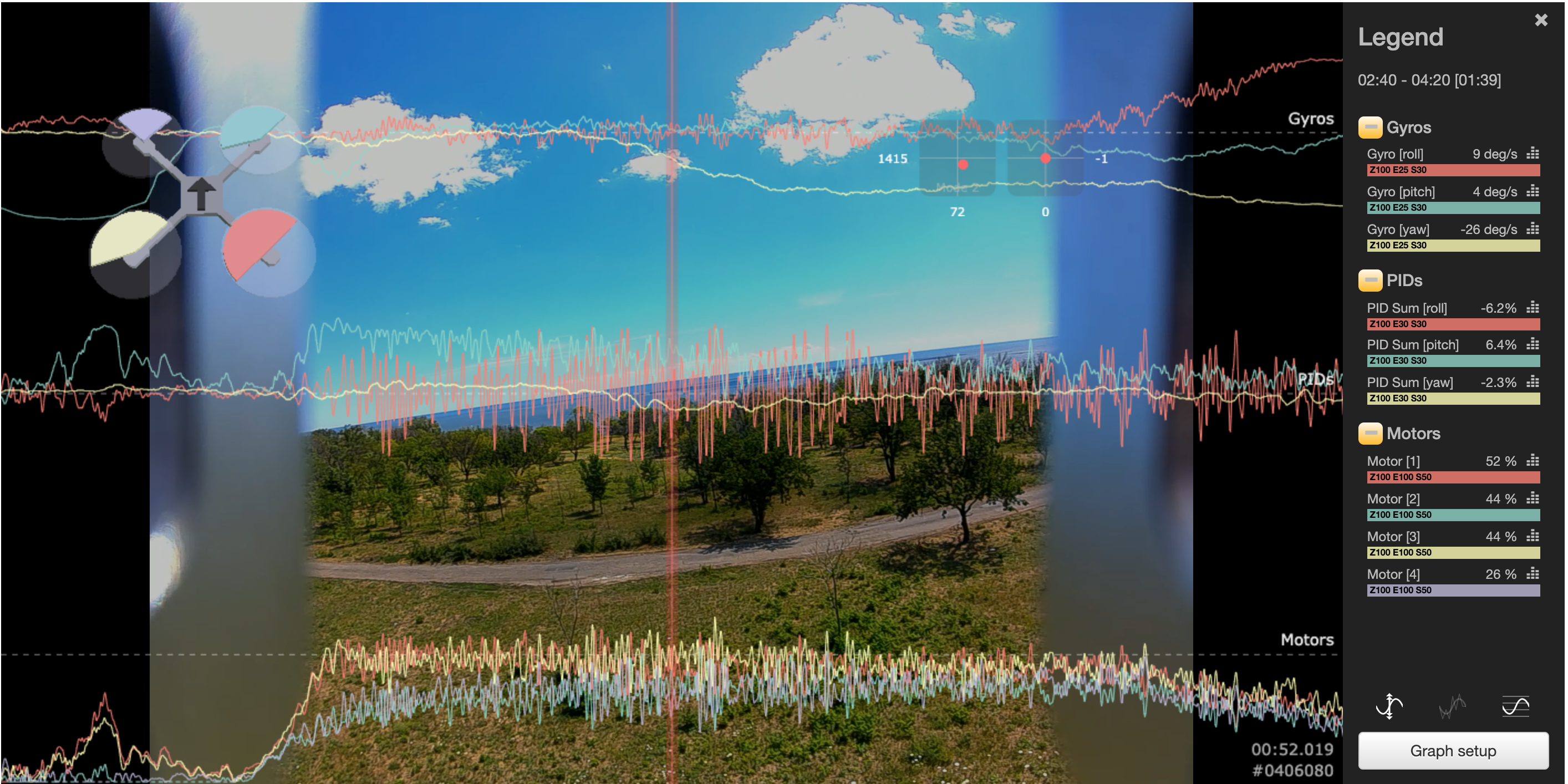
(كما ترون ، يتم تضخيم الاهتزازات من المراوح السيئة في مرحلة تحكم PID ، مما يؤدي إلى الضغط المفرط على المحركات ، فهي نقانق حرفياً)
لقطات من - Blackbox Explorer .
الترشيح
عملية التصفية هي إزالة الضوضاء الزائدة من الإشارة من الجيروسكوب. لكن كم من الإشارة من الجيروسكوب نريد الاحتفاظ بها ، وكم من التصفية؟
بصراحة ، لا يمكنني أن أخبرك بالألوان ، ولكن حدث ذلك في رحلة بيتا ، أو الضوضاء ، أو بالأحرى الاهتزازات ، تقاس بالهرتز. 1 هرتز - دورة واحدة في الثانية. يتم ذلك لسهولة التصور والعمل مع هذه المتغيرات. أيضا ، يسمى الاضطراب من الناحية الفنية "معدل تغيير الدوران" - وتيرة تغيير الدوران.
سرعة quadcopter في منطقة 0-30 هرتز. فوق 30 هرتز إلى 80 هرتز ، لدينا غسيل يدوي ، عندما تهتز كوادكوبتر من الاضطراب في تياراتها الخاصة. تعتبر المعلومات في نطاق 0 - 80 هرتز مهمة لوحدة تحكم PID ، لذلك لن نلمسها.
مع PIDtoolbox يمكنك رسم هذه البطاقات:

تمرير منخفض
الفلاتر

كما يوضح الرسم البياني السابق - تحتوي الإشارة من الجيروسكوب على معلومات من 0 هرتز إلى 1000 هرتز ، لكننا مهتمون فقط بنطاق 0-80 هرتز ، نظرًا لأن هذه هي الحركة الفعلية للكوادكوبتر التي يجب أن تعرفها وحدة تحكم PID. لذلك نحن بحاجة إلى حل تصفية للسماح للترددات المنخفضة بالمرور من خلال وحدة تحكم PID أثناء تخفيف الترددات العالية ، ولهذا يمكننا استخدام مرشح Low Pass.
تسمح مرشحات التمرير المنخفض للإشارات ذات التردد المنخفض بالمرور وتخفيف الترددات العالية ، والتي تكون في الغالب مجرد ضوضاء.
يتم تعيين تردد القطع ، وتقوم وحدة التحكم ببساطة بتقليل الإشارات فوق هذا التردد. منحنى التوهينيسمح لك بعدم قطع كل شيء تحت نظافة ، وكلما زاد تواتر الضوضاء ، زاد توهينها بسلاسة.
غالبًا ما يرتكب الطيارون خطأ تعيين مثل هذا المرشح على نفس التردد مثل الضوضاء المرئية. على سبيل المثال عند 200 هرتز. نظرًا لأن المرشح يخفف الضوضاء بسلاسة ، فإن تثبيت مثل هذا المرشح لن يعطي الكثير من النتائج. يجب ضبط الفلتر على ترددات أقل. ربما حتى عند 80 هرتز.
كلما قمت بتثبيت مثل هذا الفلتر ، كلما زاد التصفية.
هناك شيء واحد بسيط يجب مراعاته عند إعداد التصفية. كلما زاد التصفية ، زاد التأخير. من الواضح أنه بالميللي ثانية وليس مهمًا ، ولكن بالنسبة إلى وحدة تحكم PID ، فإنه أمر بالغ الأهمية. نظرًا لأنه سيبدأ في التفاعل مع الأحداث لاحقًا ، مما يعني أنه سيحاول محاذاة quadcopter في الماضي :)
مرشح الشق
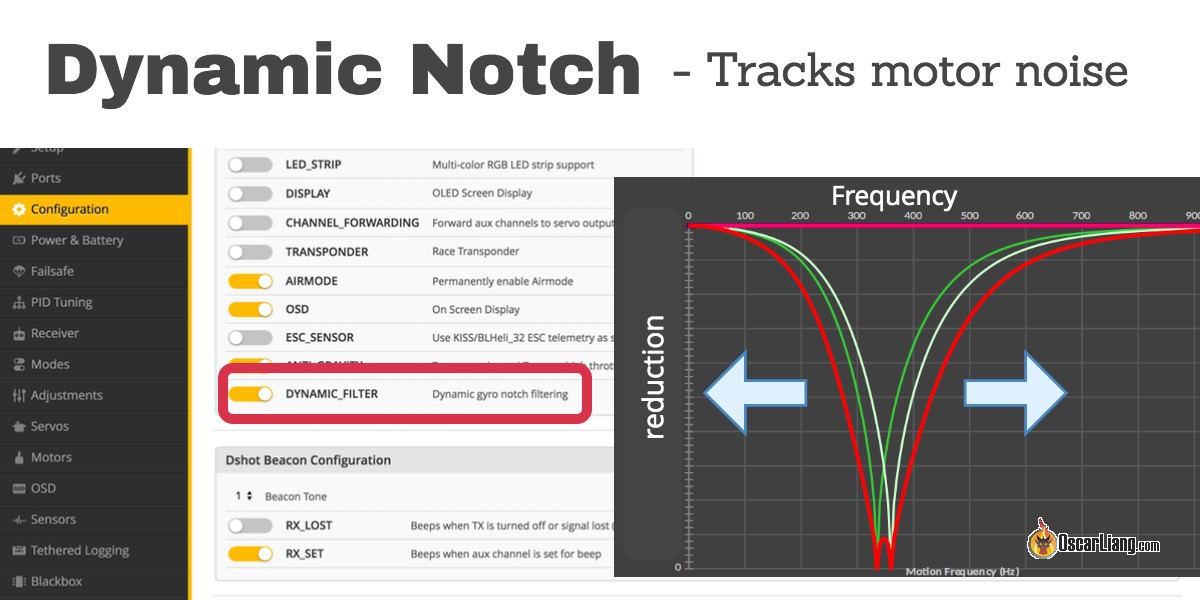
يُترجم Notch على أنه درجة ، في الواقع يبدو كالتالي: تعمل
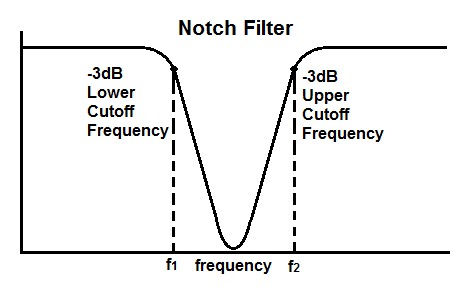
المرشحات على التخلص من بعض الضوضاء أدناه وبعض الضوضاء أعلاه . منذ Betaflight 3.1 ، تكون هذه المرشحات ديناميكية وتتكيف مع مستويات الضوضاء المختلفة.
يتم استخدام المرشحات بالاقتران مع مرشحات Low Pass ، ولكنها تُستخدم بالفعل لتصفية الضوضاء الصادرة عن المحركات الموجودة أعلاه.
تصفية مصطلح د
كما ذكر أعلاه ، فإن D قادر على مضاعفة الضوضاء من الجيروسكوب ، لذا فإن Betaflight لديه تصفية D. وفي الأسفل على الحنق يمكنك رؤية مستوى الضوضاء قبل وبعد التصفية.
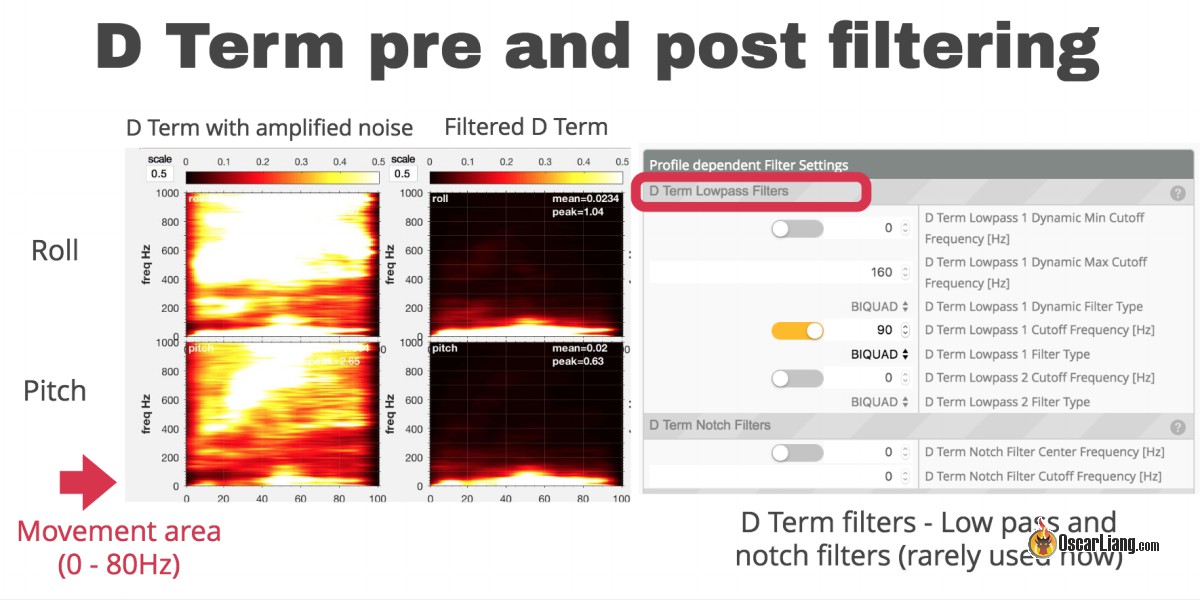
لا يوجد فهم واضح في المجتمع سواء لتصفية D بشكل كبير أم لا. ولكن هناك قاعدة للمحركات الساخنة ، وكلما قل الترشيح وكلما زادت D ، زاد تسخينها وربما احتراقها. ولكن في الاتجاه المعاكس ، حصلنا على تأخير.
فلتر RPM
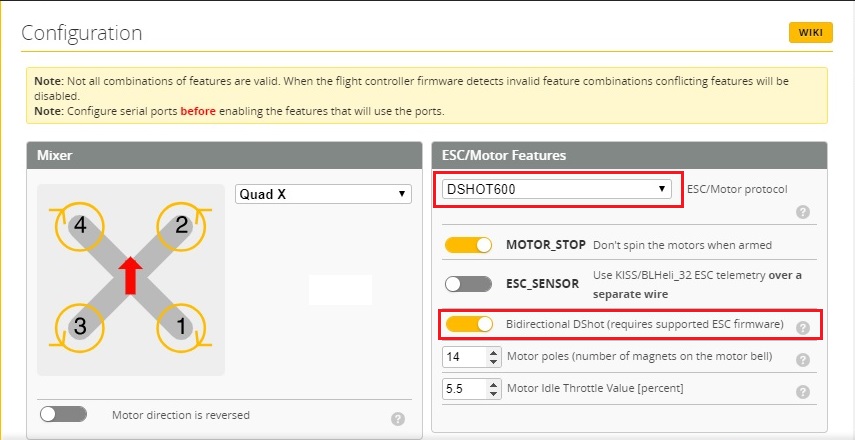
لذا ، في الواقع ، ما بدأته في استخدام الجديد هو تصفية RPM. يعمل من خلال بروتوكول DSHOT ثنائي الاتجاه الذي يسمح لوحدة التحكم في الطيران بمعرفة RPM الدقيقة لمحرك معين. وبناءً على هذه البيانات ، يتم تطبيق التصفية.
(يجب أن يدعم ESC الخاص بك DHSOT على الوجهين)
البرامج الثابتة لـ ESC ، من 3.7
إذا كانت المحركات ساخنة ، فهذه مشكلة. يمكن أن تكون المحركات الساخنة علامة على أن المحركات تحصل على الكثير من الضوضاء وتحاول الاستجابة للاهتزازات في كثير من الأحيان يتم توليد الحرارة.
يمكن أن تصبح المحركات دافئة لعدد من الأسباب ، مثل الإطار القديم ، الأجراس المنحنية على المحركات ، والتوازن غير المتوازن ، والقنابل الإضافية على طائرتك.
بالطبع من الأفضل أن يكون لديك ، كما يقولون ، بناء نظيف ، وأن كل شيء سيكون جديدًا ، ولكن يمكنك أولاً محاولة إعداد التصفية.
بادئ ذي بدء ، يمكنك البدء بزيادة التصفية D ، مع اتباع خطوات 20 هرتز. تحقق من درجة الحرارة بعد كل خطوة واعثر على النطاق الأمثل.
ويجب أن تبحث عنه بين درجة حرارة المحركات والاهتزازات. كما ذكر أعلاه ، على الرغم من أن التصفية مصممة لتقليل كمية الضوضاء ، إلا أنها يمكن أن تفرض بعض التأخيرات وقد لا تستمر وحدة تحكم PID. وبغض النظر عن كم هو مضحك ، لإحداث اهتزازات. لكن هذه الاهتزازات لا تنتمي إلى الغسل. هذه مجرد عملية PID غير فعالة.
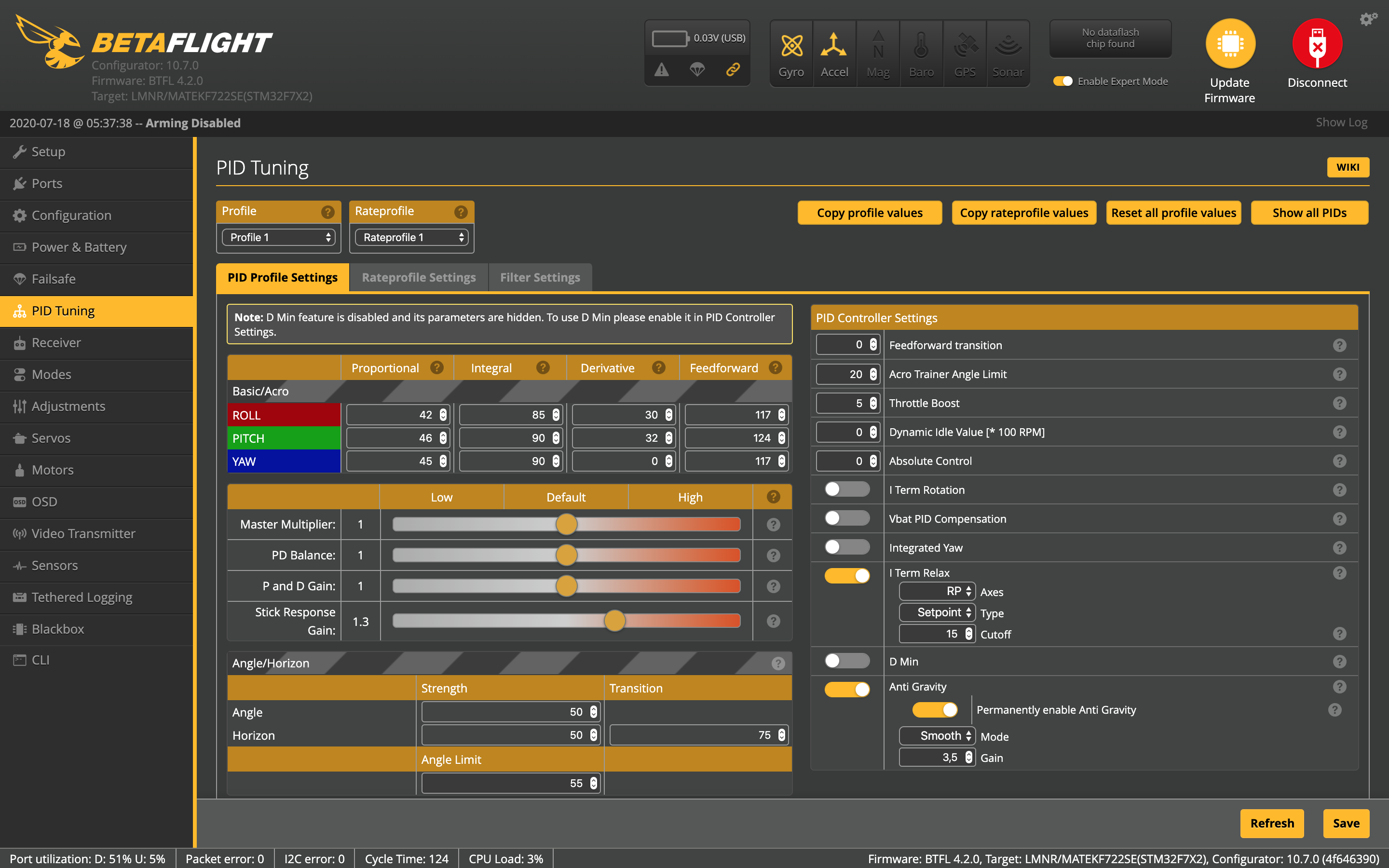
تحتوي الإصدارات الأخيرة من Betaflight على أشرطة تمرير ، حاول عدم تغيير قيم عوامل التصفية نفسها ، ولكن حاول استخدام أشرطة التمرير "الرئيسية" هذه.
في الوقت الحالي ، لدي مثل هذه الإعدادات مع تمكين فلتر RPM ، ربما سأحاول تقليل التصفية أكثر:
