
أبسط مقياس تسارع كيف يعمل؟
مقياس التسارع هو جهاز يقيس إسقاط التسارع الظاهري (الفرق بين التسارع الحقيقي لجسم ما وتسارع الجاذبية). كيف يعمل يمكن شرحه باستخدام نموذج بسيط.
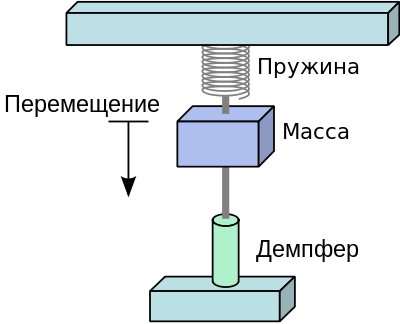
طراز جهاز مقياس التسارع الميكانيكي ( أصلي )
مع زيادة التسارع ، تمدد الكتلة الزنبرك. وفقًا لقانون هوك من منهج الفيزياء المدرسية ، يمكنك بسهولة العثور على تسريع النظام:
، حيث ك هو معامل مرونة الربيع ، هو شدها و m كتلة الحمولة.
باستخدام ثلاثة مستشعرات متعامدة ، يمكن للمرء أن يكتشف تسارع الجسم على طول 3 محاور ، ومعرفة الظروف الأولية ، وتحديد موضع الجسم في الفضاء.
هذا النموذج غير المعقد هو أساس تشغيل معظم مقاييس التسارع ، والتي يمكن تقسيمها إلى 3 مجموعات فرعية رئيسية:
- ميكانيكي
- إلكتروني
- كهرضغطية
هناك أيضًا الحرارية والبصرية ، لكننا لن نأخذها في الاعتبار. إذا كان كل شيء واضحًا مع العناصر الميكانيكية (في الواقع ، فإن عملهم ينعكس في النموذج من الأعلى) ، ثم مع الأجهزة الإلكترونية والكهربائية الانضغاطية ، يكون الأمر أكثر إثارة للاهتمام.
مقياس التسارع الكهرضغطية
يعتمد هذا النوع من المستشعرات على تأثير بيزو ، الذي اكتشفه سميث عام 1954 في أشباه الموصلات مثل الجرمانيوم والسيليكون. أعطى هذا الاكتشاف دفعة قوية لتطوير أجهزة الاستشعار والمولدات. التأثير هو توليد الإجهاد بواسطة عنصر كهرضغطية عند التشوه.

تحريك التأثير الكهرضغطية ( أصلي )
مع زيادة التسارع ، تزيد الكتلة الخاملة / تنقص الضغط على العنصر الكهرضغطية. بفضل التأثير الكهروضغطي ، يتم إنشاء إشارة تعتمد على التسارع الخارجي.

جهاز التسارع الكهروإجهادي ( الأصلي )
تتطلب أجهزة الاستشعار من هذا النوع مضخمًا إضافيًا ، مما يزيد من سعة الإشارة ويخلق مقاومة منخفضة للعمل مع الأجهزة الخارجية. يتم استخدام برغي التحميل المسبق لمعايرة قيمة التسارع الصفرية ، والتي يتم حساب كتلتها لتتوافق مع نقطة الصفر للتسارع في النظام.
لا تزال أجهزة الاستشعار من هذا النوع منتشرة على نطاق واسع ، وتستخدم بشكل أساسي في الأنظمة التي تتطلب موثوقية عالية - السيارات. بالنسبة للإلكترونيات التجارية ، غالبًا ما تستخدم مقاييس التسارع الإلكترونية ، وهي أصغر حجمًا وأرخص.
مقاييس التسارع الإلكترونية
يعتمد مبدأ تشغيل المستشعرات الإلكترونية على تغيير في سعة المكثفات مع تغيير في التسارع. يظهر أبسط نموذج للعمل في الصورة.
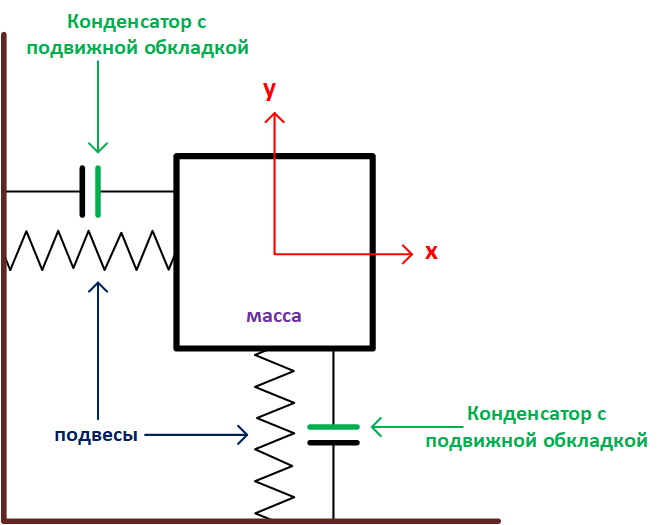
جهاز مقياس التسارع الكهروميكانيكي ثنائي المحور
عندما يتغير التسارع ، تغير الكتلة المسافة بين ألواح المكثف. من أبسط صيغة لسعة المكثف ويترتب على ذلك أنه عندما تتغير d في المسافة بين الألواح ، فإن سعة المكثف ستتغير أيضًا. تستخدم هذه الطريقة على نطاق واسع بسبب تطوير MEMS (MEMS) - الأنظمة الكهروميكانيكية الدقيقة.
تتيح تقنيات MEMS إمكانية إنشاء مكثفات بألواح متحركة على ركيزة من السيليكون ، مما يقلل بشكل كبير من حجم الجهاز ، وتكلفته ، وهو أمر غير مهم.

جهاز مقياس التسارع الكهروميكانيكي ثنائي المحاور (الأصل من كتاب "التمهيدية MEMS" . تم أخذ المزيد من الرسوم التوضيحية أيضًا من هذا الكتاب)
ربما يكون لدى القارئ سؤال: "كيف بالضبط يكتشف التغيير في مكثف السعة؟" سأحاول تقديم إجابة شاملة على هذا السؤال.
جهاز مقياس التسارع MEMS. كيف تحول التغير في السعة إلى إشارة؟
نصف جسر بالسعة
لذا ، قبل وصف تشغيل المستشعر نفسه ، دعنا ننتقل إلى دائرة شائعة إلى حد ما في الدوائر - نصف الجسر السعوي.

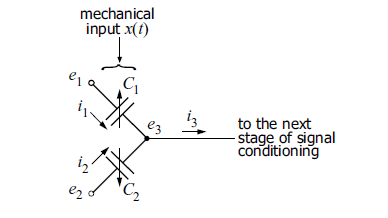
نصف الجسر السعوي - أساس مجسات
الجهد MEMS و هي المدخلات ، و - إشارة الخرج للتحويل اللاحق. تعتمد سعات كلا المكثفين على التسارع الخارجي وتتغير بالقيمة x (t). عند x = 0 ، تكون الرسوم على الحاويات متطابقة وفي نفس الوقت . بشرط أن x << d ، نجد كيف يعتمد التغيير في سعة المكثفات على التغيير في موضع اللوحة.
اشتقاق معادلة تغيير السعة
دعونا نكتب التغيير في كل سعة عندما يتم إزاحة اللوحة بواسطة x:
:
, :
, x <<d, xd d^2 , :
:
, :
, x <<d, xd d^2 , :
لقد تم تجاوز جزء من المسار ، وحصلنا على كيفية اعتماد قيمة التغيير في السعة على التغيير في موضع اللوحة (أي ، التسارع الخارجي). حان الوقت لاكتشاف هذا التغيير: نقدم تيارات إضافية - . الآن يبقى حساب كيف سيعتمد تيار الإخراج على التغيير في موضع اللوحة.
نصف الجسر السعوي - التيارات
اشتقاق معادلة اعتماد تيار الخرج على التغير في السعة
:
, dq/dt, q=CU, :
, (1.1):
, dq/dt, q=CU, :
, (1.1):
لذلك إذا كنت تستخدم نفس إمكانات جهد الإدخال نحصل على الاعتماد الحالي:
النتيجة غريبة نوعًا ما: تيار الخرج لا يعتمد بأي شكل من الأشكال على التغير في السعة. من أجل اكتشاف تغير في السعة ، من الضروري ضبط الفولتية ذات القطبية المختلفة على الألواح ، أي: ، و . ثم سنعيد المعادلة مع مراعاة هذا التعديل.
اعتماد التيار على التغيير في موضع اللوحة ، مع مراعاة القطبية المختلفة لجهد الإدخال
1.3:
:
:
1.2 , :
:
:
1.2 , :
من هذه المعادلة ، تظهر الحقائق التالية:
- إذا لم يتغير موضع اللوحات بمرور الوقت ، إذن
- بالمثل إذا كان مصدر الإشارة ثابت e s (DC) ، ثم
من أجل التشغيل الفعال للجسر النصف السعوي ، من الضروري استخدام إشارات الإدخال المتغيرة e1 و e2 ، حيث يكون إزاحة الطور بينهما 180 درجة (بحيث يكون للإمكانيات علامات مختلفة). لذلك ، نحصل على الشكل التالي من الإشارات:
أين هو تردد الإشارة المتناوبة (يتم تحديده في مرحلة التصميم ، اعتمادًا على عرض نطاق النظام والتشغيل العادي للحاويات الميكانيكية).
لذلك ، حصلنا على المعادلة (1.4) ، والتي توضح كيف يؤثر التغيير في سعة المكثف على خرج النظام. ومع ذلك ، ستكون مثل هذه الإشارة صغيرة في الاتساع ، إلى جانب ذلك ، إذا قمنا بتوصيل حمولة بها للتواصل مع العالم الخارجي ، فسوف ينهار النظام بأكمله. مضخم الصوت مطلوب هنا ...
فقط أضف مكبر للصوت
دعنا نضيف مكبر للصوت إلى نظامنا (سنفترض أن المكسب هو - مبدأ الأرضية الافتراضية يعمل أيضًا).
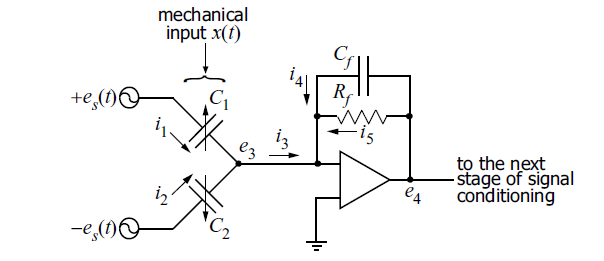
مكامل نصف جسر سعوي + مكامل
لذا سنجد الآن اعتماد جهد الخرج لمكبر الصوت على التغيير في السعة.
جهد خرج مكبر للصوت
:
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
نتيجة لذلك ، حصلنا على اعتماد إشارة خرج مكبر الصوت على التغيير في موضع لوحة المكثف. يجب على القارئ اليقظ أن يلاحظ على الفور أن هذا هو تعديل السعة! في الواقع ، في هذا النظام لدينا إشارة x (t) ، والتي تتضاعف مع الإشارة ويتم تضخيمها بالقيمة . الخطوة التالية هي إزالة تردد الموجة الحاملة ، ونحصل على إشارة مضخمة x (t) - والتي تتناسب مع التسارع. قادتنا طريقة طويلة في الحوسبة إلى فهم بنية مقياس التسارع MEMS.
هندسة التسارع MEMS
لننظر أولاً في المخطط الوظيفي لجهاز الاستشعار:
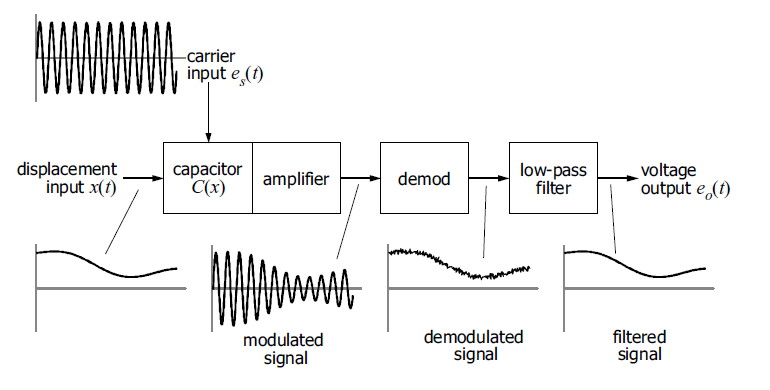
رسم تخطيطي وظيفي لمقياس التسارع MEMS. في
البداية ، لدينا إشارة x (t) - والتي تعكس التغيير في التسارع. بعد ذلك ، نضربها في إشارة الناقل وتضخيمها بمكبر تشغيلي (في وضع التكامل). بعد ذلك ، يحدث إزالة التشكيل - أبسط دائرة - صمام ثنائي ومرشح RC (في الواقع ، يتم استخدام دائرة معقدة ، تزامن عملية التشكيل وإزالة التشكيل مع تردد ناقل واحد ). ثم يتم ترشيح الضوضاء المتبقية باستخدام مرشح تمرير منخفض.
على سبيل المثال ، سأستشهد بأحد مقاييس التسارع الأولى لنظام MEMS من الأجهزة التناظرية - ADXL50:
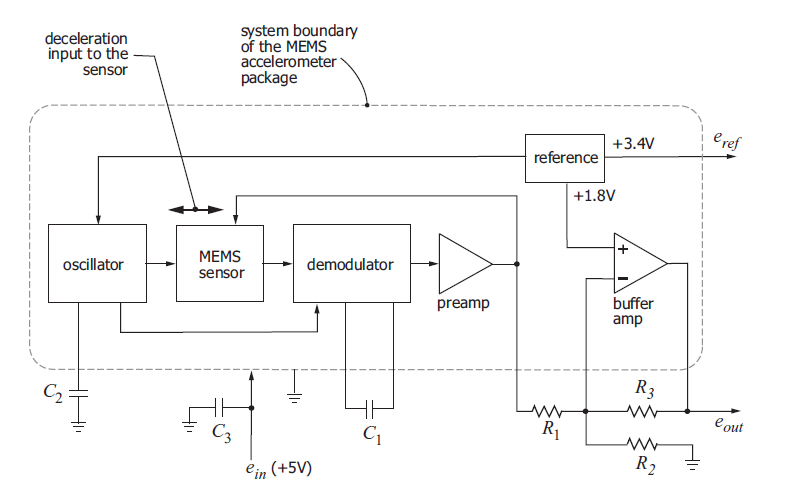
رسم تخطيطي للكتلة ADXL50 على
الأرجح ، مع إعطاء مخطط كتلة المستشعر في بداية المقالة ، لن يفهم العديد من القراء الغرض من بعض الكتل. الآن الحجاب معلن ويمكننا مناقشة كل منهما:
- الكتلة المسماة "مستشعر MEMS" عبارة عن جسر نصف سعوي.
- تولد كتلة "المذبذب" إشارة بتردد 1 جيجاهرتز.
- تُستخدم إشارة المذبذب أيضًا لإزالة التشكيل المتزامن.
- يُنشئ مضخم الإخراج والمقاومات الإضافية نقطة الصفر ، والتي يمكن رؤية علامة تغيير التسارع بالنسبة لها (عادةً ما يكون VDD / 2 هو نصف مصدر الطاقة ، أما بالنسبة لأجهزة الاستشعار ثنائية القطب فهو "أرضي").
- القدرة الخارجية تحدد C 1 عرض نطاق القياس للنظام.
- لا يوجد مرشح تمرير منخفض داخلي في هذه الدائرة ، ولكنه موجود في الدوائر الحديثة.
ما هو محول الطاقة الذي يجب اختياره للعمل مع المستشعرات؟
يعتمد اختيار محول الطاقة للعمل مع المستشعرات على الدقة التي تريدها. للعمل مع المستشعرات ، تعد ADCs ذات بنية SAR أو Delta-Sigma ذات العمق العالي مناسبة. ومع ذلك ، تحتوي المستشعرات الحديثة على محولات طاقة مدمجة. الشركات الرائدة في هذا المجال هي STMicroelectronics والأجهزة التناظرية و NXP. كمثال ، يمكننا إعطاء دائرة كهربائية دقيقة جديدة مع مقياس تسارع ثلاثي المحاور و ADC - ADXL362 مدمج.

مخطط كتلة ADXL362
للعمل مع ADC ، تمت إضافة مرشحات منع التعرج إلى الدائرة لاستبعاد التوافقيات الإضافية من دخول الطيف.
من أين يمكنك الحصول على هذه التكنولوجيا؟
يوجد الآن العديد من المصانع المتاحة لشركات فابليس التي تقدم تقنية النظم الكهروميكانيكية الصغرى. ومع ذلك ، لإنشاء دوائر دقيقة حديثة ، من الضروري دمج السعات مع اللوحات المتحركة في مسار تصميم قياسي ، لأنه بالإضافة إلى هذه السعة ، من الضروري تصميم كتل إضافية (مولد ، مزيل تشكيل ، المرجع ، إلخ) على شريحة واحدة. على سبيل المثال ، تقدم مصانع TSMC و XFab التكنولوجيا لتنفيذ مستشعر MEMS جنبًا إلى جنب مع الحزام بالكامل. توضح الصورة الحاويات التي تسمح لك بإنشاء مقياس تسارع ثلاثي المحاور:
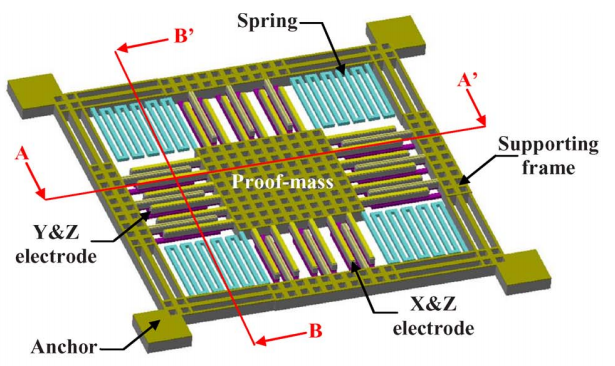
جسر نصف سعوي ثلاثي المحاور من TSMC
يوجد أيضًا مصنع لإنتاج مستشعرات MEMS في روسيا - سوفتيست ، لكن المؤسسة لا تمتلك التكنولوجيا اللازمة لدمج كتل الدوائر الإضافية الضرورية لإنشاء الجهاز النهائي والمخرج الوحيد هو استخدام تقنية التجميع الدقيق.
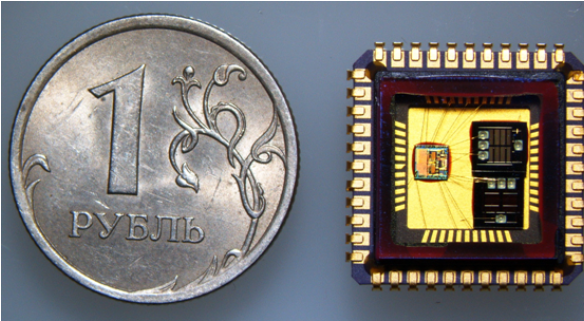
مقياس تسارع MEMS تم تطويره بواسطة Sovtest
ما التطورات التي تمتلكها شركتنا في هذا الاتجاه؟
لدينا العديد من محولات الطاقة المصممة للعمل مع أجهزة الاستشعار. تشمل المنتجات الجديدة:
- 5101NV035 - محول 16 قناة يعتمد على 8 Delta-Sigma ADC ، مصمم للعمل مع أجهزة الاستشعار الحالية
- 1316NX035 عبارة عن محول تردد-جهد متكامل مكون من 4 قنوات (VFR) مصمم للعمل مع مقاييس تسارع وجيروسكوبات ثلاثية المحاور.
كما كتبت في المقال السابق ، يمكن أن تستغرق فترة انتظار اللوحات من المصنع وقتًا طويلاً. بعد التشغيل التجريبي الأول لـ 400 ميجاهرتز ADC ، استغرق وقت وصول الألواح والقياسات الإضافية أكثر من نصف عام. خلال هذا الوقت ، تمكن فريقنا من إنشاء PNC 1316NX035 (تطوير للمخطط السابق 1316PP1U ) ، والذي يمكنني إخبارك به قليلاً.
محول تردد الجهد
لتحويل البيانات من المستشعر ، عادةً ما يتم استخدام SAR أو ADCs delta-sigma ، ومع ذلك ، هناك نوع آخر من المحولات - دمج VFCs ، والتي لها مزايا كبيرة:
- تشغل مساحة أرضية أقل ولديها استهلاك أقل بنفس الخطية والضوضاء.
- هندسة بسيطة.
- مناعة عالية لإدخال الضوضاء وإشارات التداخل.
- حصانة من الضوضاء والتداخل من إشارة الخرج.
- القدرة على نقل البيانات دون معالجة إلى قناة اتصال تردد لاسلكي.
الدائرة المصغرة 1316HX035 عبارة عن محول جهد إلى تردد رباعي القنوات ورمز رقمي ؛ يتم توصيل مخرجات مقياس التسارع ثلاثي المحاور بثلاث قنوات رئيسية عالية الدقة. تحتوي القناة الرابعة على مُضاعِف إدخال رباعي القنوات ، حيث يمكنك توصيل مستشعرات نظام إضافية: درجة الحرارة ، والرطوبة ، وما إلى ذلك. تحت المجهر ، تبدو الدائرة كما يلي:
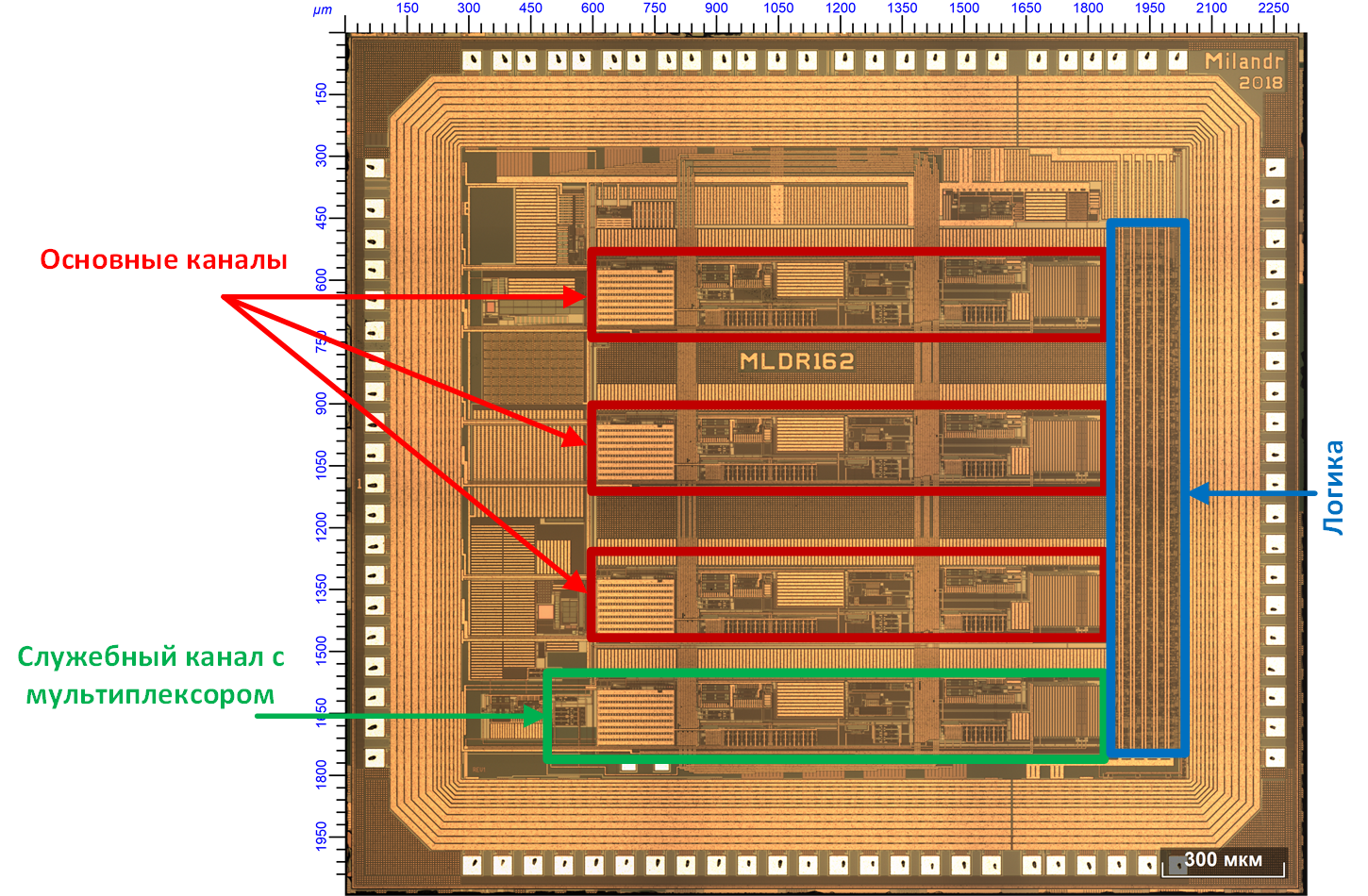
VFC تحت المجهر تقوم
كل قناة من القنوات الرئيسية الثلاث بتحويل جهد الدخل في نطاق ± 4V إلى تردد يصل إلى 1250 كيلو هرتز عند 3 مخرجات ، بما يتوافق مع الفولتية الموجبة والسالبة. أيضًا ، تحتوي الدائرة المصغرة على عداد عكسي 16 بت في كل قناة لحساب نبضات التردد. يتم استخدام واجهة SPI للتحكم في أوضاع التحويل وأخذ عينات من محتويات عدادات نبض القناة. المتطلبات الرئيسية لمعلمات PNC كانت:
- استقرار حراري وزمني عالي لتردد الخرج عند إشارة إدخال صفرية (مدخلات مؤرضة)
- النطاق الديناميكي للتحويل - لا يقل عن 22 بت
- استمرار تحويل إشارة الدخل وعدم مقبولية فقدان أي نبضة تردد.
لتلبية المتطلبات 1 و 2 ، يتم استخدام المعايرة التلقائية التناظرية ، والتي يتم إجراؤها تلقائيًا عند تشغيل الدائرة ، ويمكن أيضًا بدء تشغيلها في أي وقت عن طريق الأمر عبر واجهة SPI. يتم توفير المتطلب 3 وضمانه بواسطة حلول الدوائر. كان من الممكن تحقيق معلمات دقة مناسبة تمامًا: كان التحويل النموذجي غير الخطي 30 جزء في المليون ، وكان الإزاحة الصفرية أقل من 0.1 هرتز مع عامل تحويل 200 كيلو هرتز / V. نطاق التحويل الديناميكي: fmax / fmin = 2 * 1.25MHz / 0.3Hz ∿ 8.33M ، والذي يتوافق مع أكثر من 23 بت.
هناك تغذية واحدة "لكن" - ثنائية القطب. لضمان الاستقرار الصفري الجيد (الجهد الذي يتوافق مع تسارع 0g) ، يجب استخدام مصدر ثنائي القطب. هذا الحل فعال للغاية - بعد كل شيء ، عندما يتوافق 0g مع "الأرض" ، سيكون النظام مستقرًا بشكل مسبق. كما أنه يحسن تصميم النظام. في المستشعرات الحديثة ، يتم استخدام نصف إمداد Vdd / 2 كصفر ، ومع ذلك ، إذا كانت قيمة الجهد عند المحول تختلف عن الجهد عند المستشعر ، فإننا نحصل تلقائيًا على تعويض يحتاج إلى معايرته بشكل إضافي.
ربما ، بالنسبة للعديد من المستهلكين ، فإن الجهد ثنائي القطب يخيف قليلاً ، ونحن ، كمطورين ، نفهم ذلك. ربما ، في المستقبل سنصنع نسخة تجارية لـ MEMS (أو ندمج المستشعر في PNC). حتى الآن ، بالطبع ، هذه مجرد خطط ، لكنني متأكد من أنهم سيرون ضوء النهار. وجد
PS صورًا إضافية من عينة عملية البحث. بشكل عام ، هذا ، بالنسبة لي ، هو الجزء الأكثر إثارة للاهتمام في عملية التطوير. يعطونك بين يديك من بنات أفكارك في حرارة المصنع ، وتزودها بالطاقة وتنتظر - "هل تعمل أم لا؟"

PPS أيا كان من أحب موضوع المستشعرات ، في المستقبل يود زميل من مركز تصميم الأجهزة التحدث عن نظام القصور الذاتي الذي يتم إنشاؤه على أساس مستشعرات MEMS - SINS .