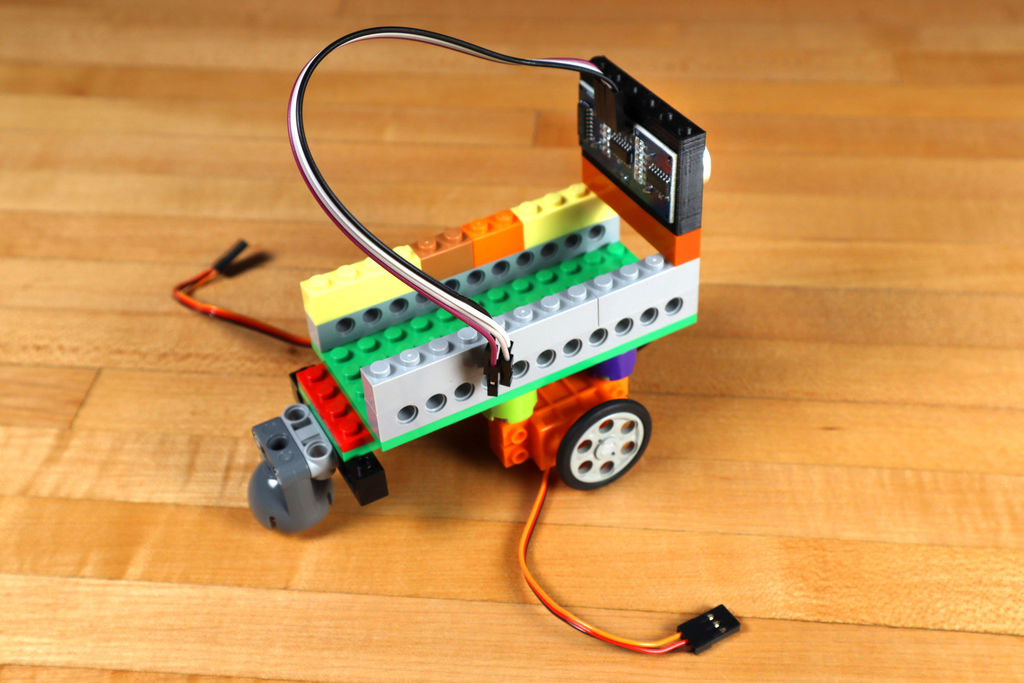
نحن نحب LEGO و Crazy Circuits [إلكترونيات متوافقة مع LEGO / تقريبًا. ترجمة.] ، لذلك قررنا دمجها في روبوت بسيط ومثير للاهتمام يمكنه تجنب العقبات. سنوضح لك كيفية تجميع مثل هذا الروبوت ووصف العملية بالتفصيل. قد لا يكون إصدار الروبوت الخاص بك مطابقًا تمامًا لإصدارنا.
فيما يلي قائمة بالإلكترونيات وأجزاء LEGO المطلوبة. لا تتردد في تجربتها.

مكونات
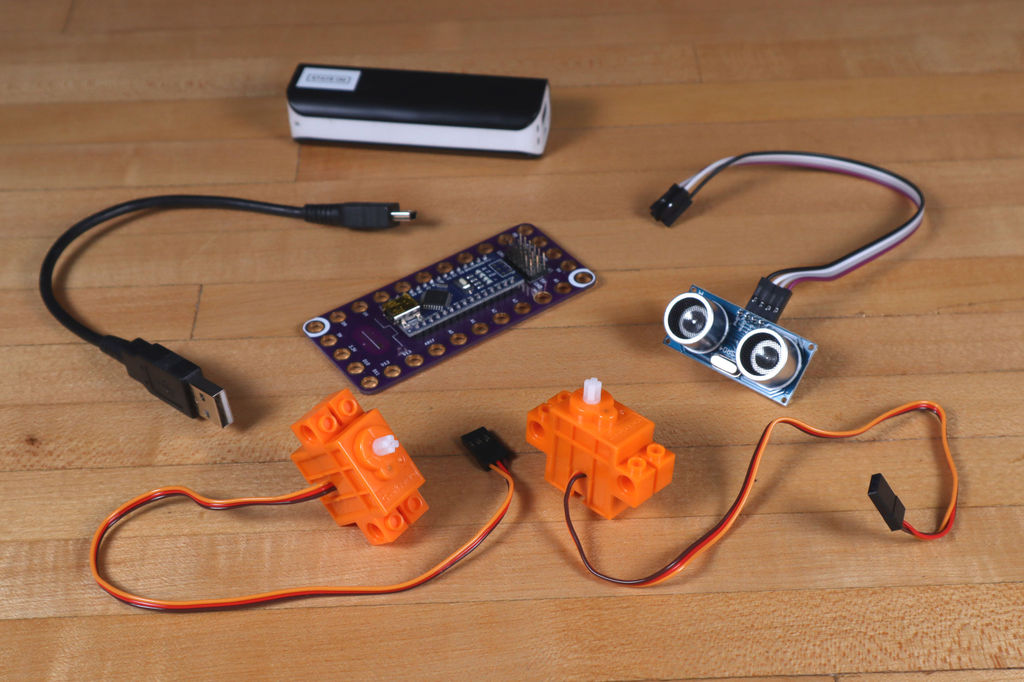
إلكترونيات
- 1 × لوحة الروبوتات من Crazy Circuits
- 2 × LEGO متوافق مع محرك سيرفو كامل الدوران
- 1 × مستشعر المسافة بالموجات فوق الصوتية HC-SR04
- 4 × كابلات توصيل من أنثى إلى أنثى
- 1 × مصدر طاقة خارجي مع USB
بالنسبة لمشروعنا ، اخترنا مصدر طاقة خارجيًا صغيرًا يتناسب بشكل مريح مع الروبوت الخاص بنا. قد تضطر إلى تصميم مصدر الطاقة الخارجي الخاص بك ، أو لمجموعة من البطاريات.
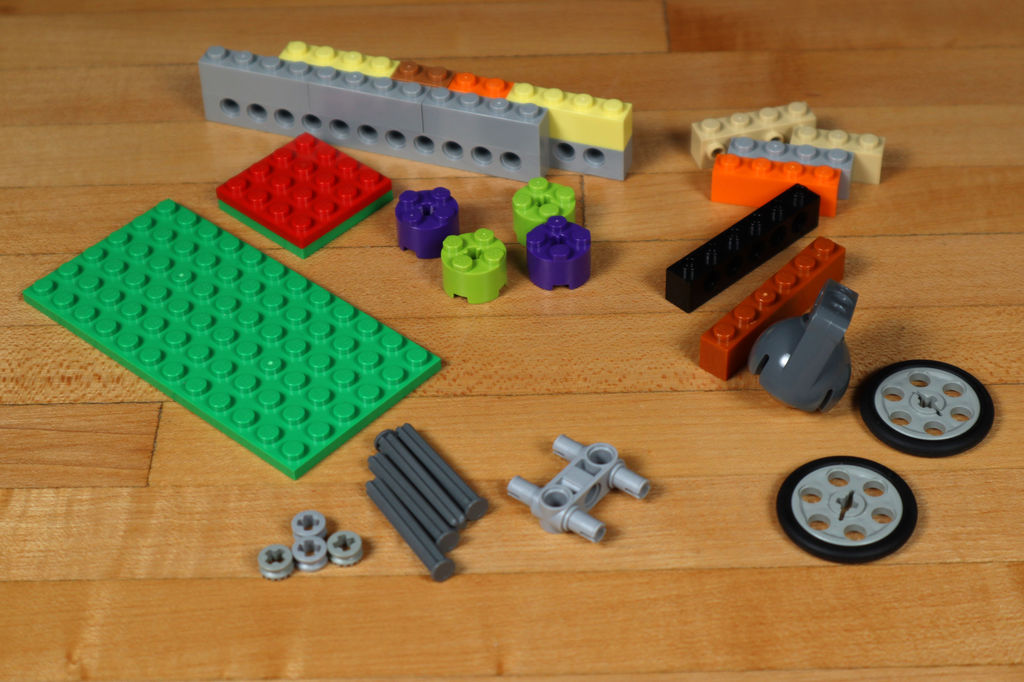
العاب تركيب
استخدمنا تفاصيل مختلفة ، لكننا نوصي بأن تفعل ذلك على النحو الذي تراه مناسبًا ، ومن بين ما لديك. من المهم أن يكون لديك طريقة لتوصيل الماكينات بالجزء السفلي ، ومستشعر الموجات فوق الصوتية بحيث يتطلع إلى الأمام ، ويؤمن اللوحة ومصدر الطاقة بطريقة ما. للقيام بذلك ، يمكنك استخدام الشريط على الوجهين ، والأشرطة المرنة ، الفيلكرو. توجد روابط لقطعنا في متجر BrickOwl ، ولكن يمكنك شرائها أينما تُباع LEGO والمجموعات المتوافقة.
- 2 × LEGO Wedge Belt Wheel (4185/49750)
- 1 × LEGO EV3 Technic Ball Pivots Set 5003245
- 1 × LEGO Technic Cross Block Beam 3 مع أربعة دبابيس (48989/65489)
- 1 × مكعبات ليجو تكنيك 1 × 6 بفتحات (3894)
- 2 × ليغو المحور 4 مع نهاية توقف (87083)
- 4 × LEGO Half Bushing (32123/42136)
- 4 × مكعبات ليجو 2 × 2 دائرية (3941/6143)
- 1 × لوحة ليغو 6 × 12 (3028)
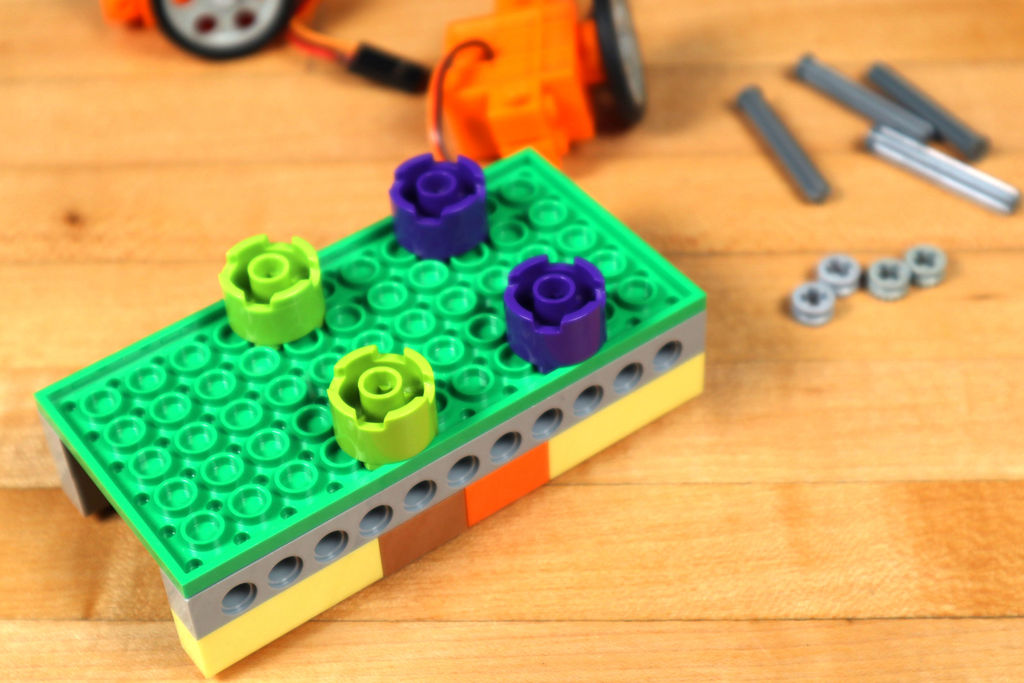
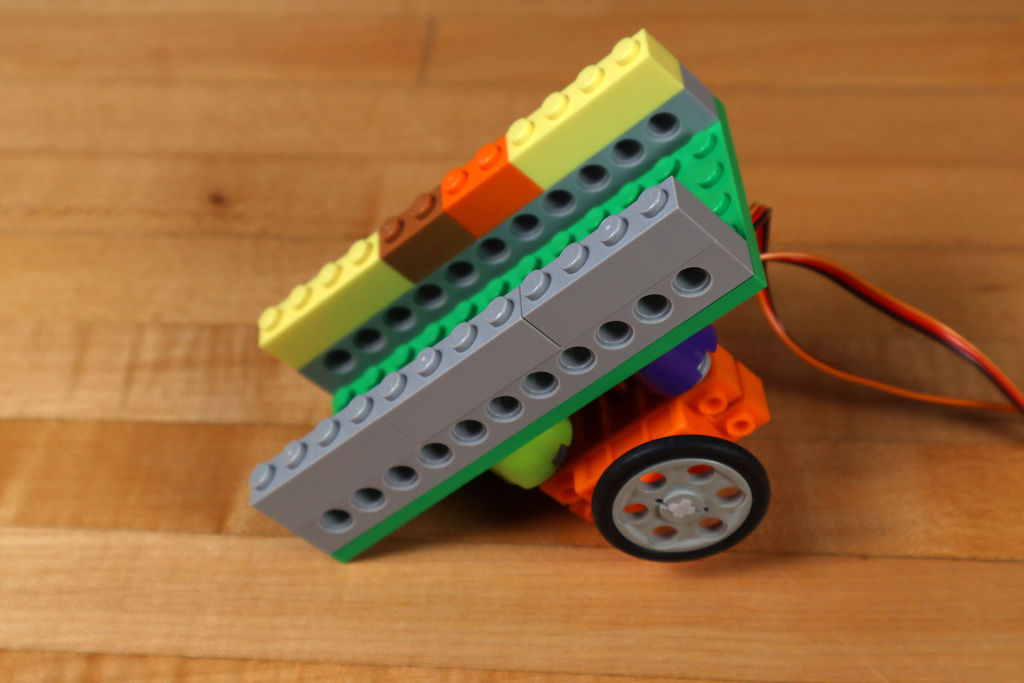
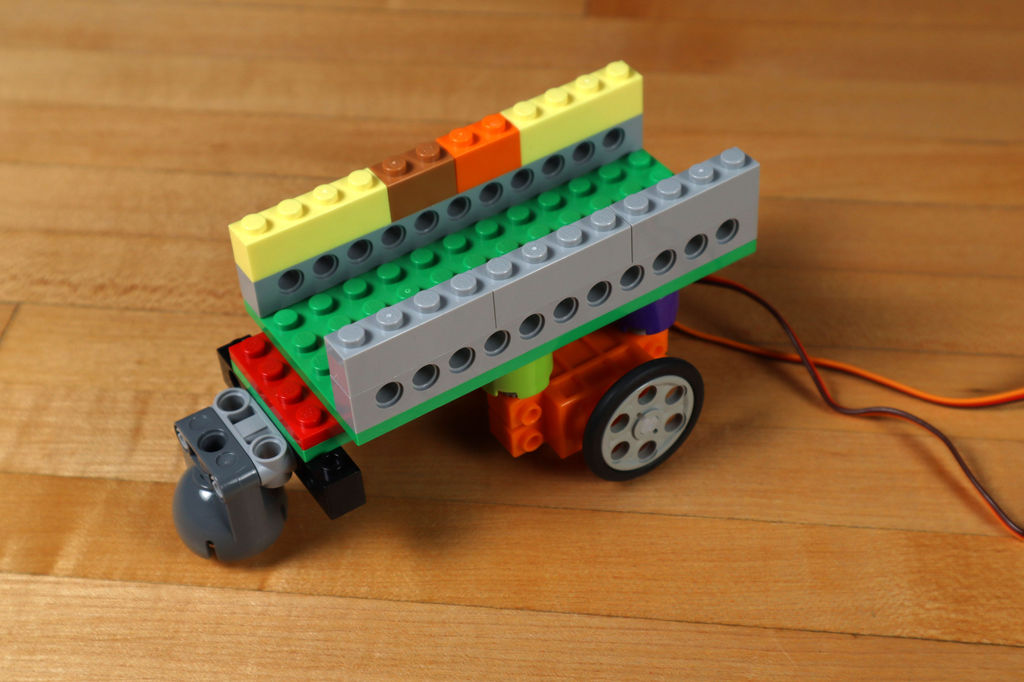
الخطوة 1: بناء هيكل LEGO
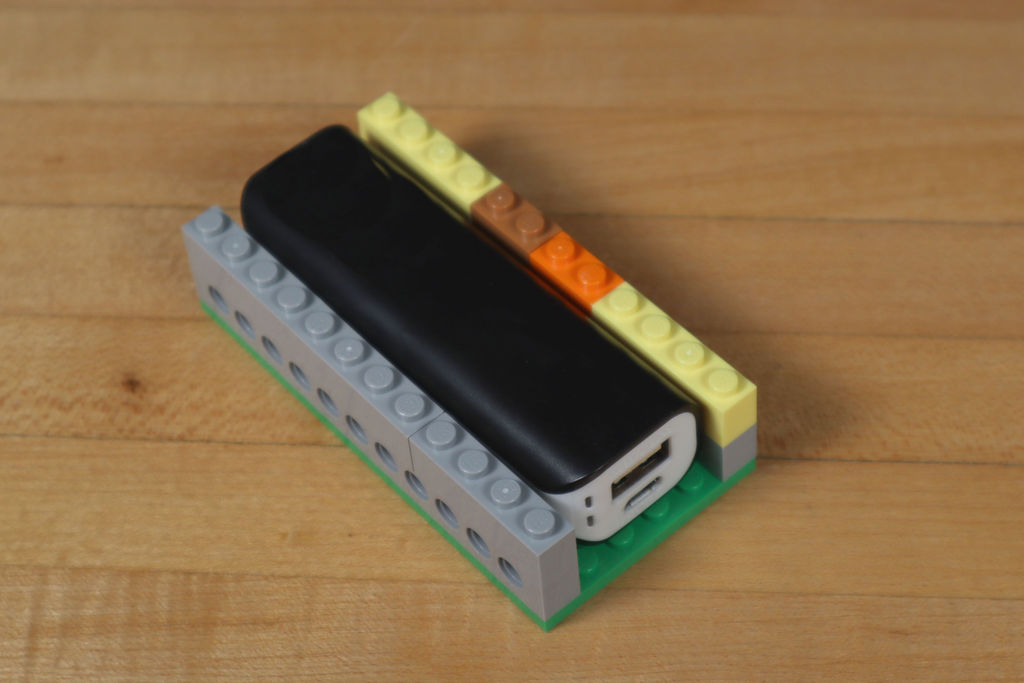
بدأنا بلوحة LEGO مقاس 6 × 12 ، وهو الحد الأدنى للحجم الذي كنا سعداء به. يمكنك استخدام واحدة أكبر ، لكن الأصغر سيكون بالفعل أكثر صعوبة.
تم تحديد عرض الروبوت من خلال مصدر الطاقة الخارجي المتاح لدينا ، حيث كنا بحاجة إلى القدرة على تحريكه في مكانه. تتطلب البطارية الأكبر حجمًا روبوتًا أكبر.
يجب أن يكون الهيكل مرتفعًا بما يكفي لاستيعاب البطارية واللوحة في الأعلى.
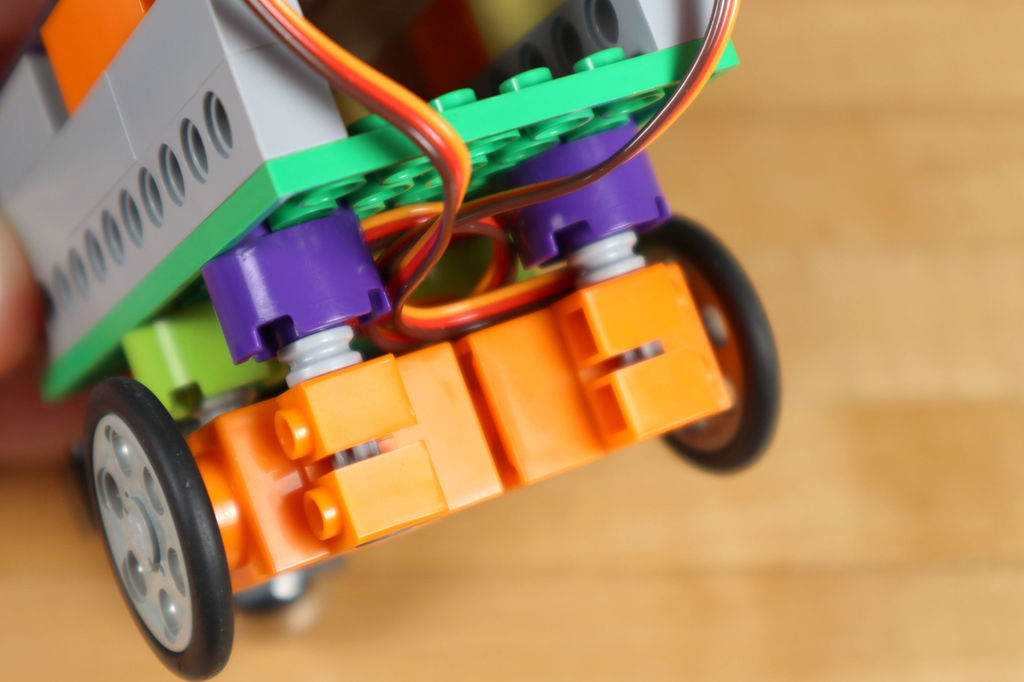
الخطوة 2: إضافة عجلات
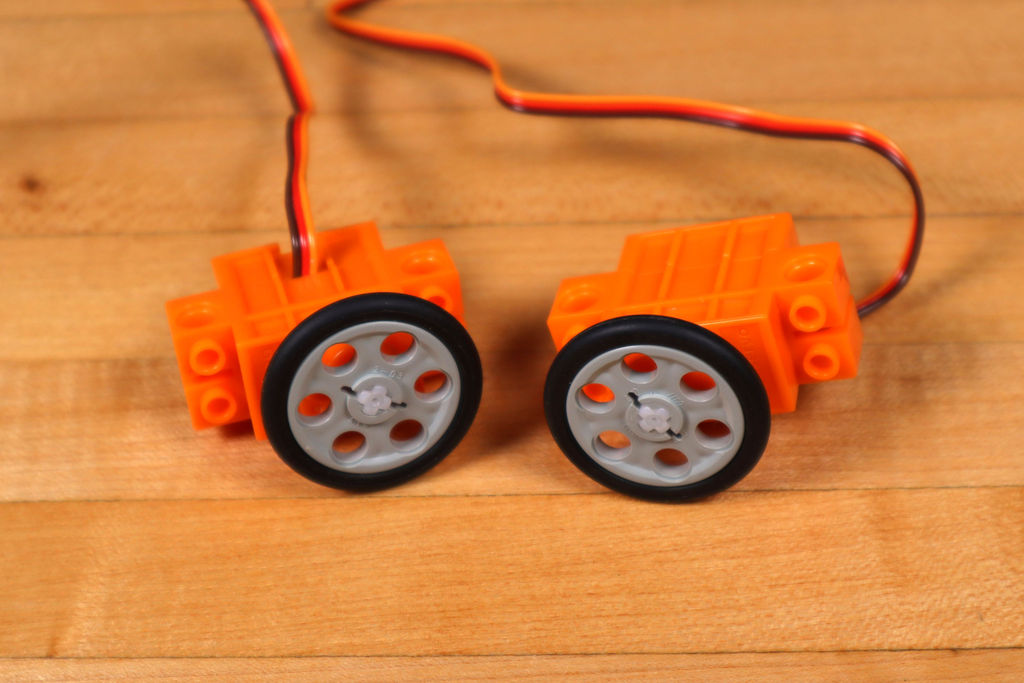
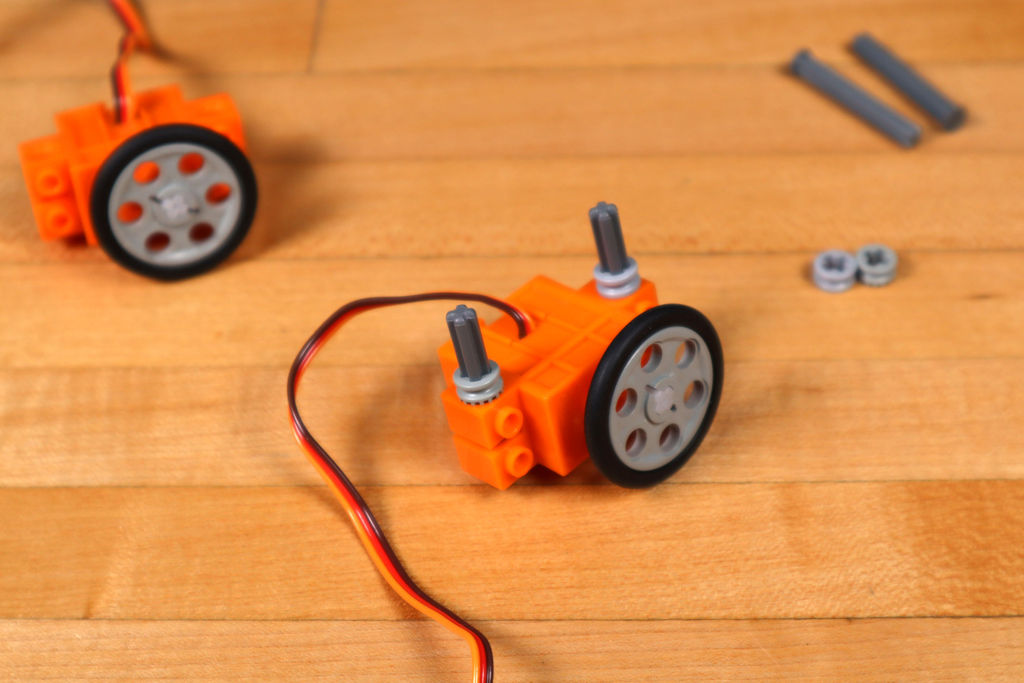
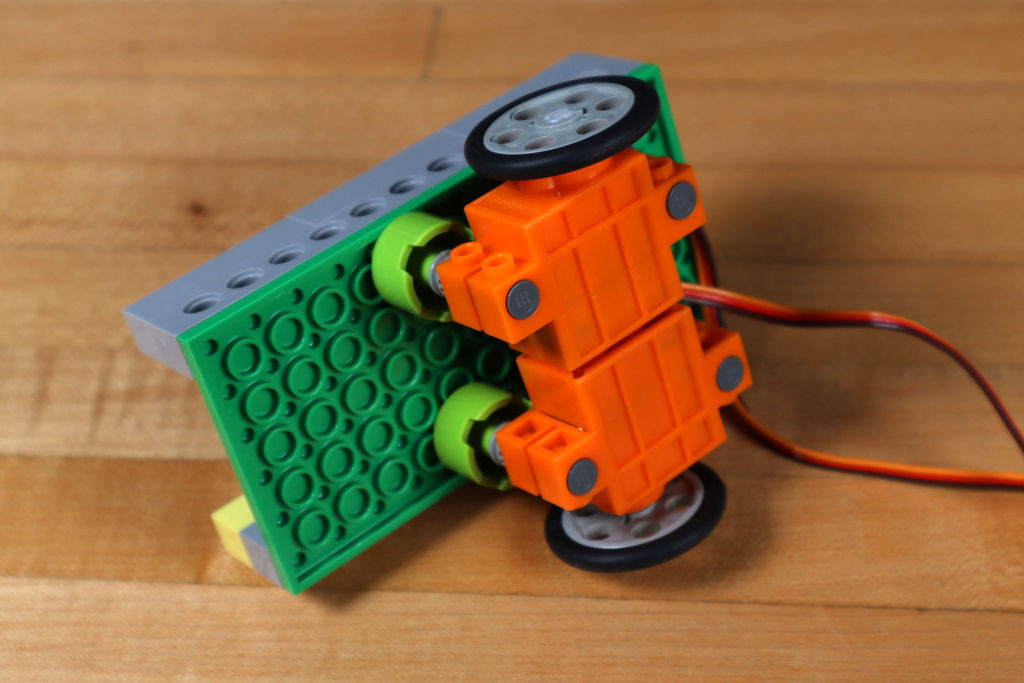
يجب وضع كل معززات أسفل الهيكل المعدني. نتيجة لذلك ، احتجنا إلى المكونات التالية:
- المحور 4 ليغو مع سدادة (87083)
- محور LEGO (32123/42136)
- مكعبات ليجو دائرية 2 × 2 (3941/6143)
لإصلاح محركين ، تحتاج إلى 4 قطع من كل مكون. بعد تثبيتها ، أضف عجلة: LEGO Wedge Belt Wheel (4185/49750).
كما هو الحال مع نماذج LEGO الأخرى ، هناك الكثير من الخيارات! نجحنا بالمكونات التي قمنا بإدراجها ، ولكن يمكنك تجربة شيء آخر.
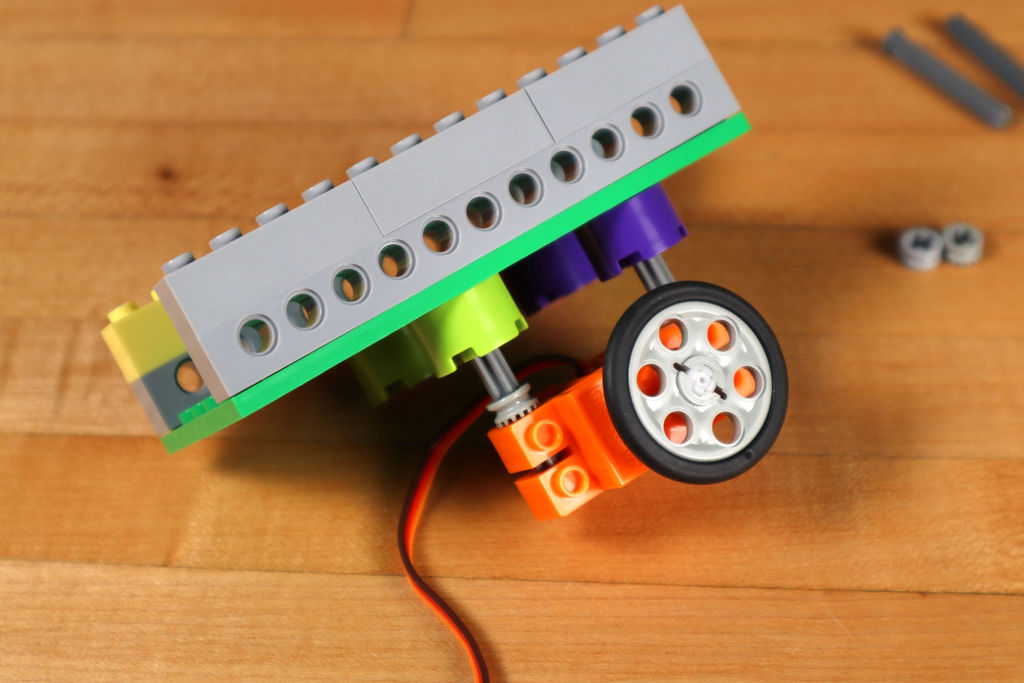
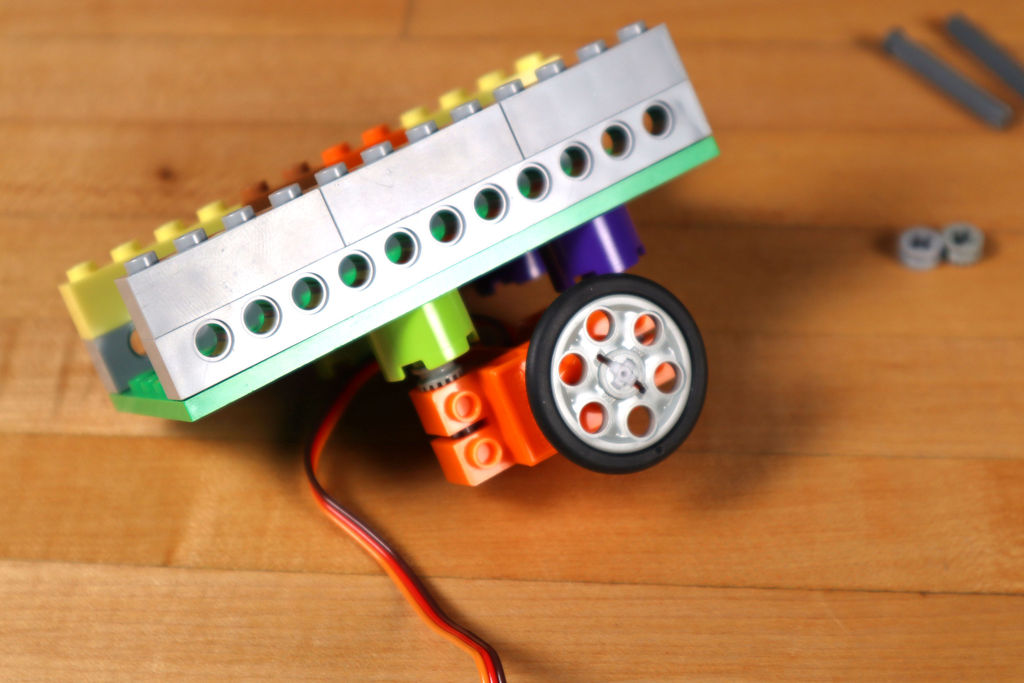
الخطوة 3: أضف الفيديو
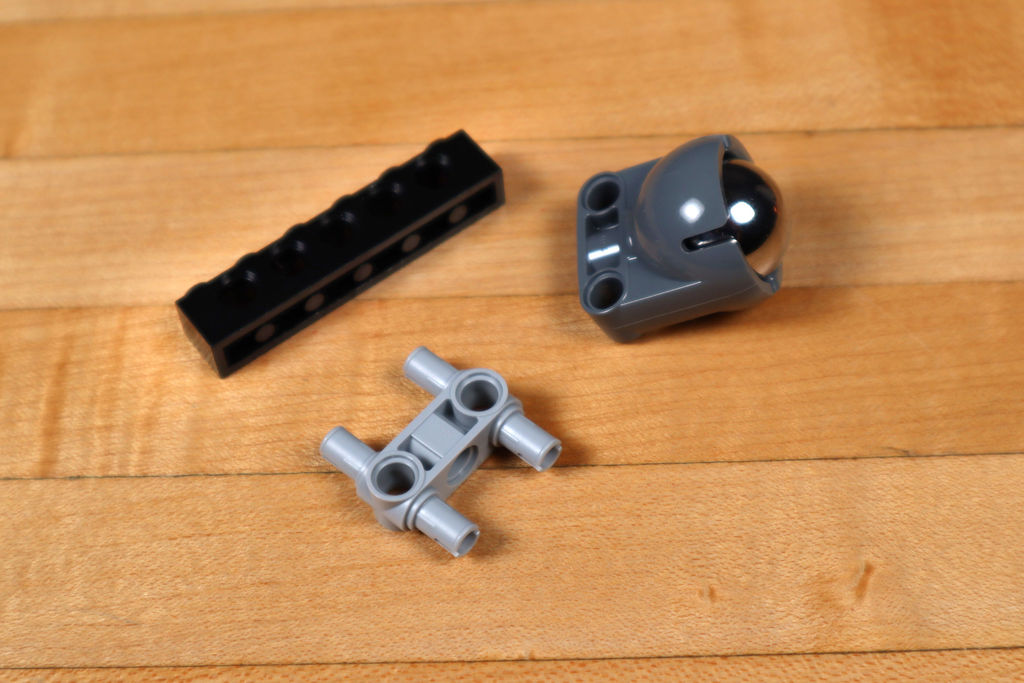
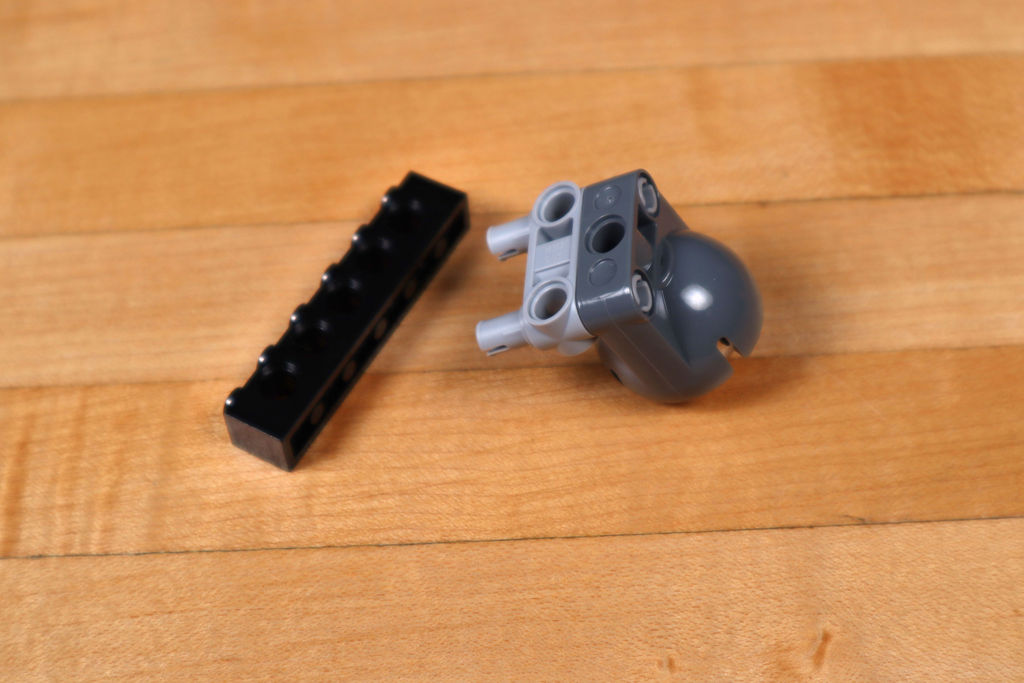
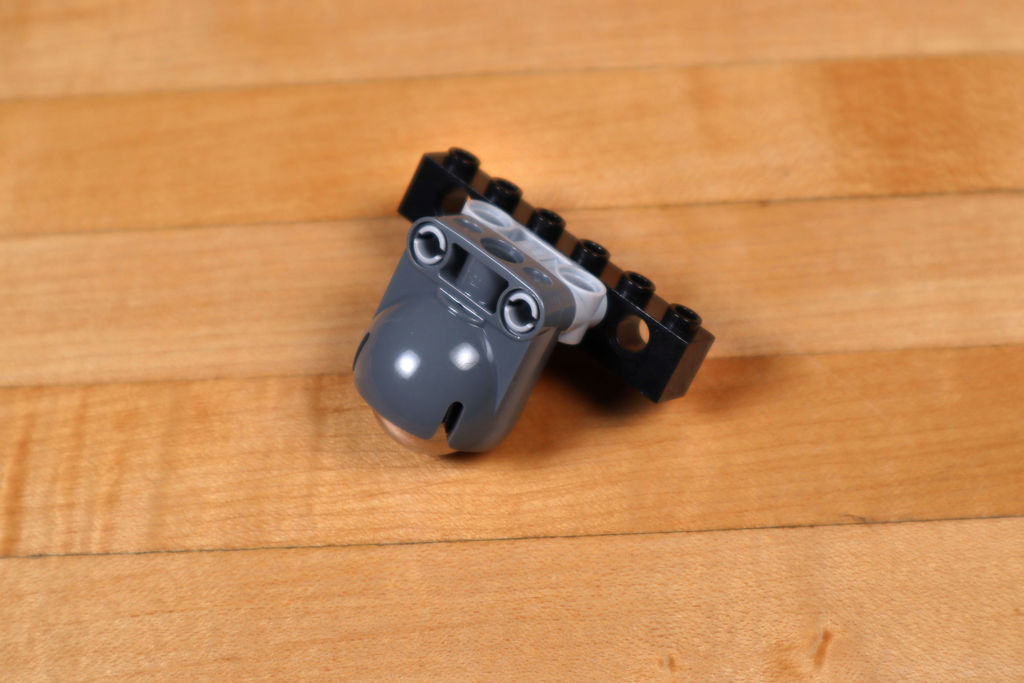
تسمح الأسطوانة الخاصة بنا للإنسان الآلي بالتدحرج على متن طائرة على عجلتين آليتين ، ليكون بمثابة عجلة ثالثة - وهذا يسهل على الروبوت الدوران والتحرك.
لتأمينه ، كانت التفاصيل التالية مطلوبة:
- مجموعة كرات محورية تكنيك من ليجو EV3 5003245
- ليجو تكنيك كروس بلوك بيم 3 بأربعة دبابيس (48989/65489)
- مكعبات ليجو تكنيك 1 × 6 بفتحات (3894)
في الإصدار السابق ، استخدمنا قطع LEGO المستديرة فقط لـ "الساق" وعملت بشكل جيد على الأسطح الملساء. لكن لم يعمل على سجادة أو أرضية ناعمة. إذا لم يكن لديك بكرة ، ففكر في استخدام هذه "الساق".
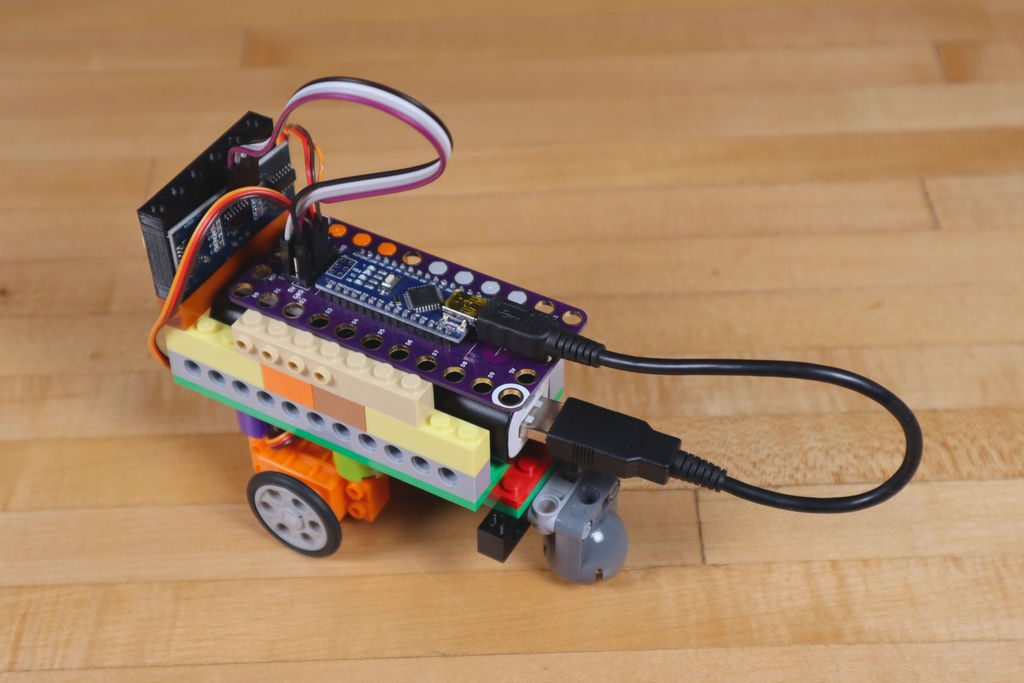
الخطوة 4: أضف مستشعر المسافة
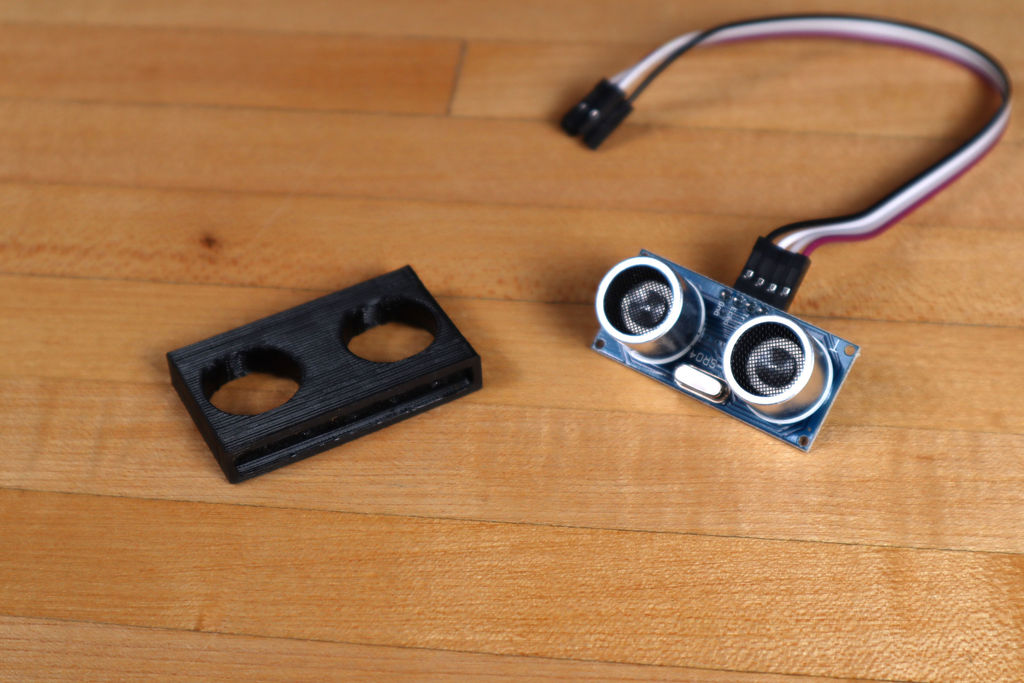
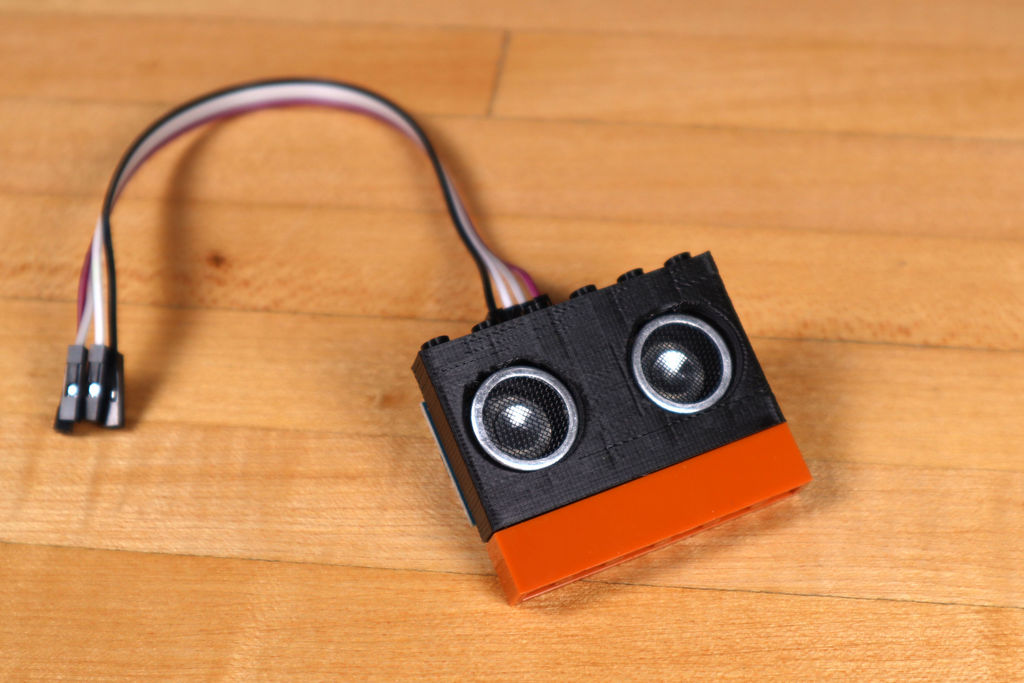
يجب توصيل مستشعر المسافة بالموجات فوق الصوتية بمقدمة الروبوت بحيث "يرى" إلى أين يتجه ويعرف متى يتوقف حتى لا يصطدم بأي عائق.
بالنسبة للمستشعر ، قمنا بطباعة غلاف متوافق مع LEGO. تم نشر النموذج على موقع Thingiverse الإلكتروني: www.thingiverse.com/thing : 3171004
إذا لم يكن لديك طابعة ثلاثية الأبعاد ، فتعرف على كيفية حمل المستشعر باستخدام قطع LEGO وشريط لاصق وأشرطة مطاطية وأربطة كبلات وما إلى ذلك. من المهم أن ينظر إلى الأمام مباشرة - حيث يتجه الروبوت عندما يتحرك للأمام.
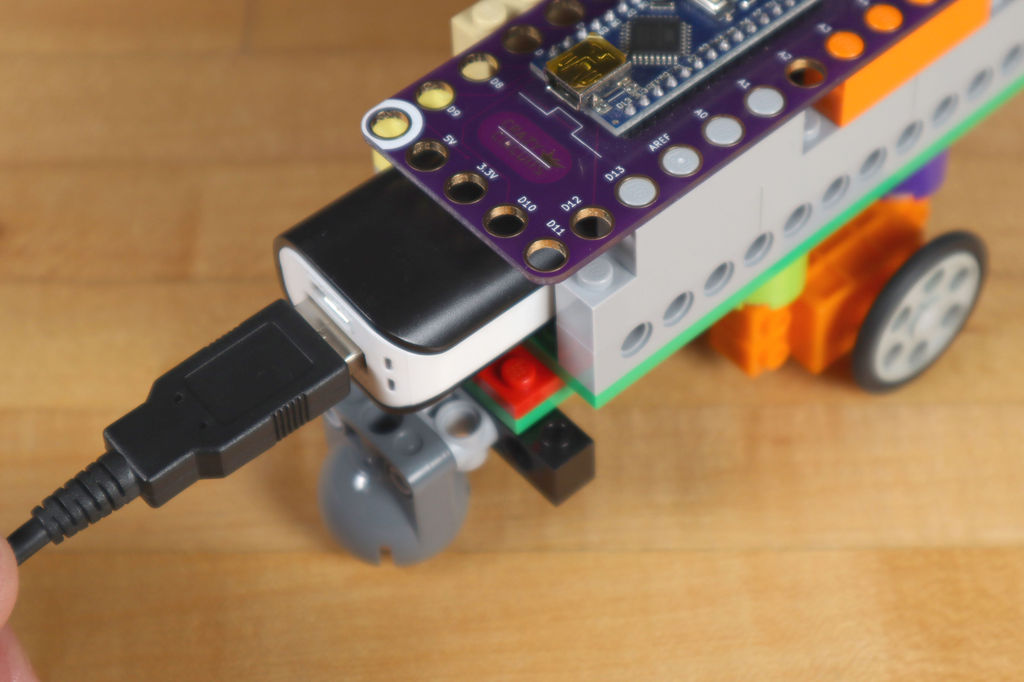
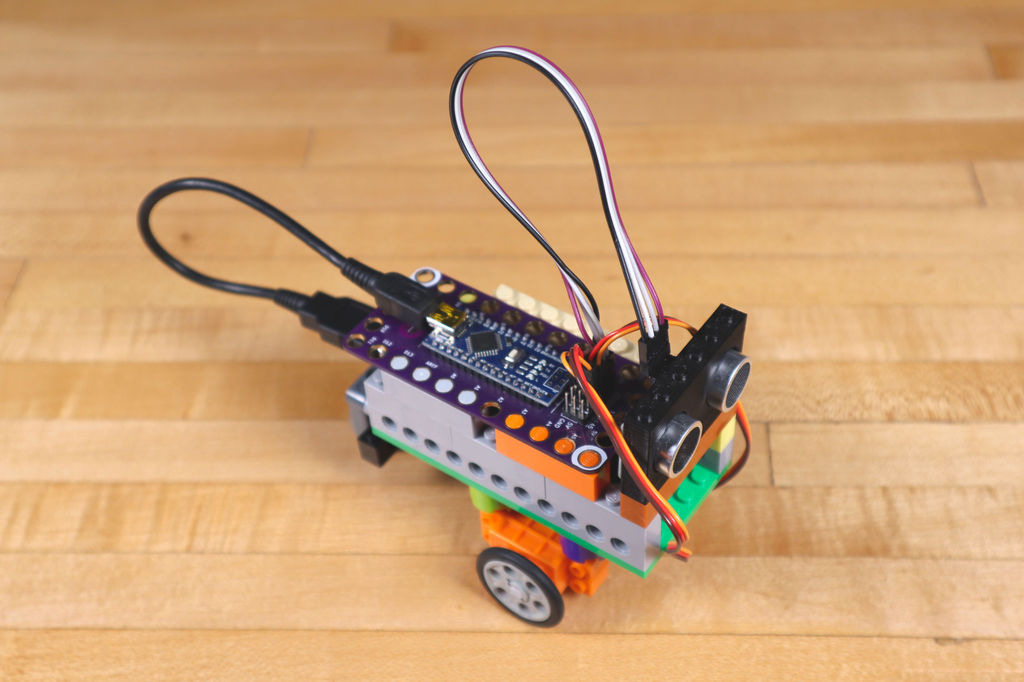
الخطوة 5: أضف اللوحة
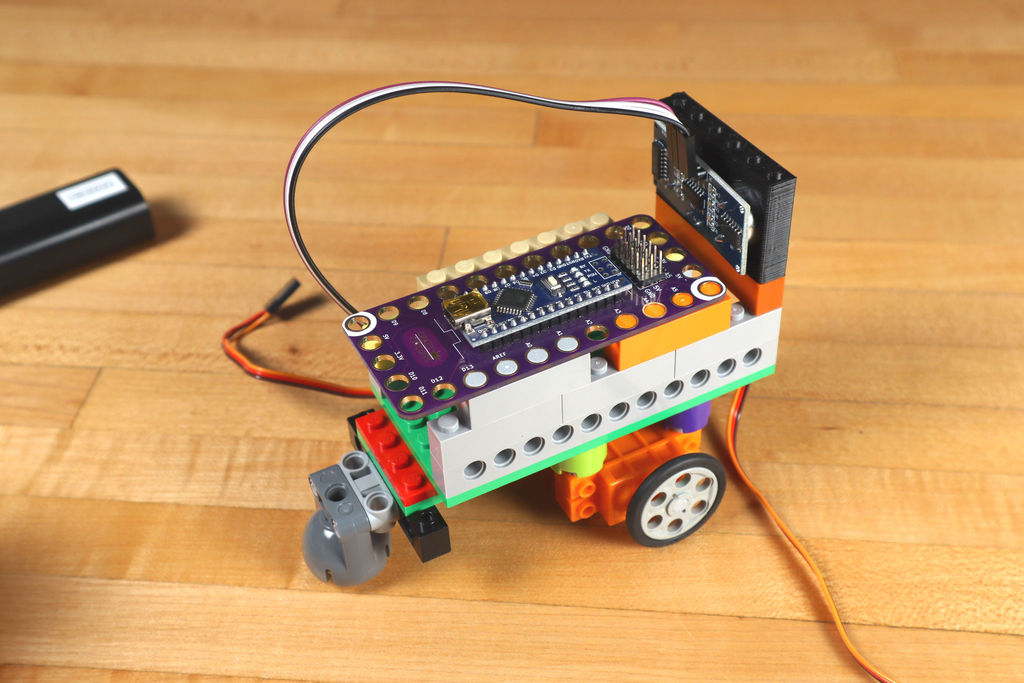
الرسوم هي عقل العملية بأكملها. يتم تثبيتها فوق مكعبات LEGO ، لذا من السهل إرفاقها.
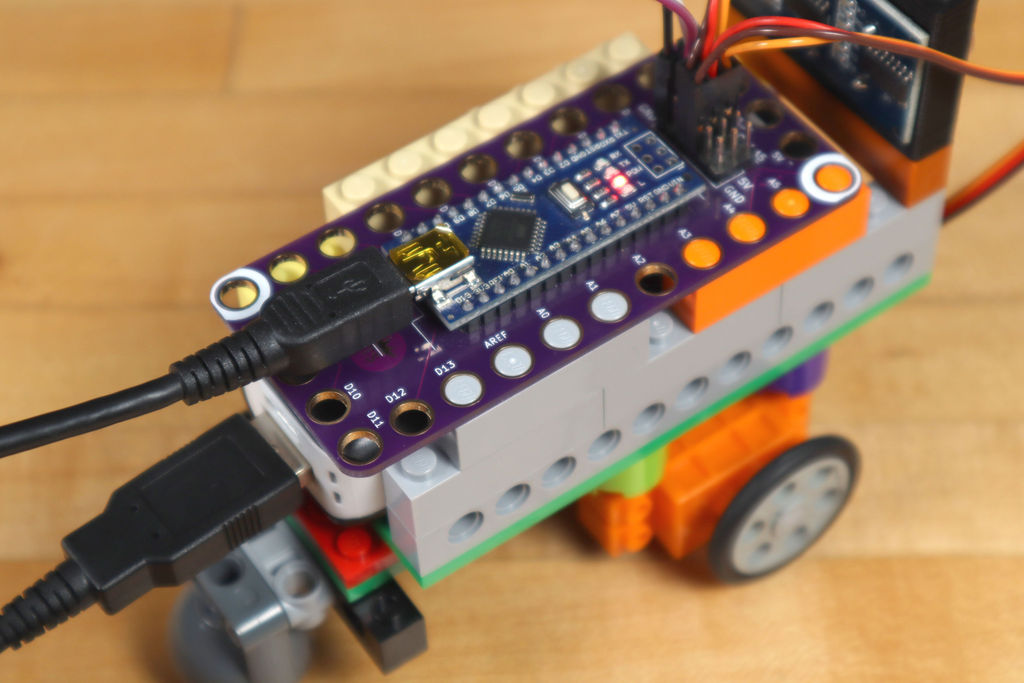
عادةً ما يتم استخدام لوحة الروبوتات جنبًا إلى جنب مع شريط موصل يسمح لك بعبث الدوائر الكهربائية مباشرةً أعلى LEGO ، ولكن نظرًا لأن لدينا محركان فقط ومستشعر المسافة ، فيمكن توصيلهما مباشرة بالمسامير الموجودة على اللوحة.
نضع اللوحة بحيث يسهل توصيل كابل طاقة USB. لقد حالفنا الحظ في العثور على كبل USB قصير جدًا في صندوق الكابلات.
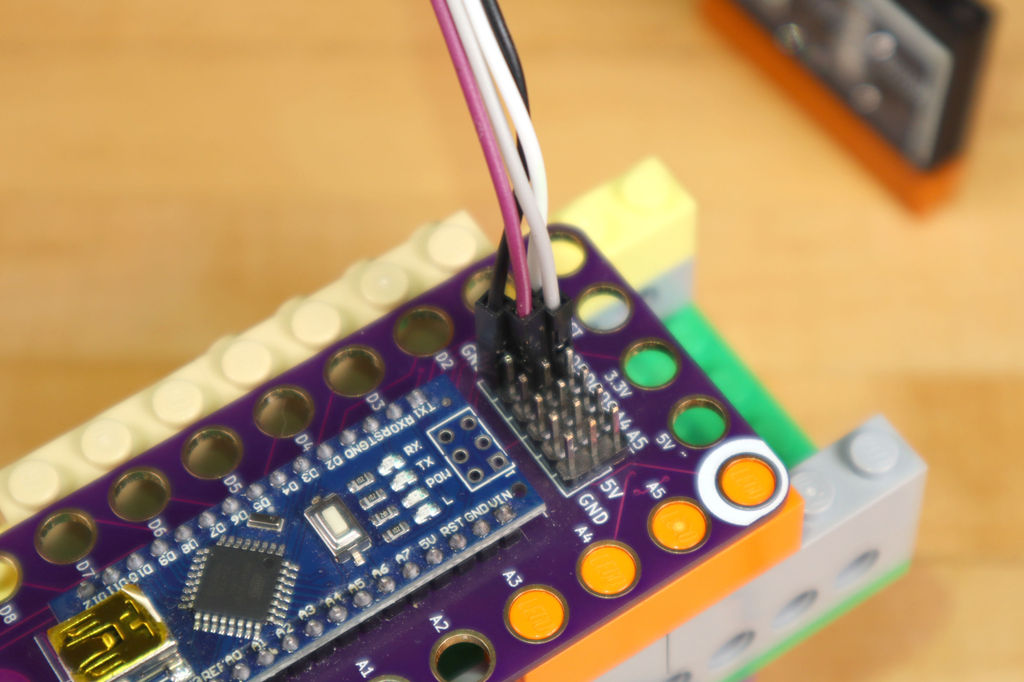
الآن يمكنك توصيل المستشعر والمحركات!
بالنسبة للمستشعر: يجب توصيل موصل echo بالدبوس 3 على اللوحة ، وموصل المشغل بالدبوس 5 ، و VCC - إلى 5 V ، و Gnd - بـ GND. وبالتالي ، سيتلقى المستشعر الطاقة ويتواصل مع اللوحة.
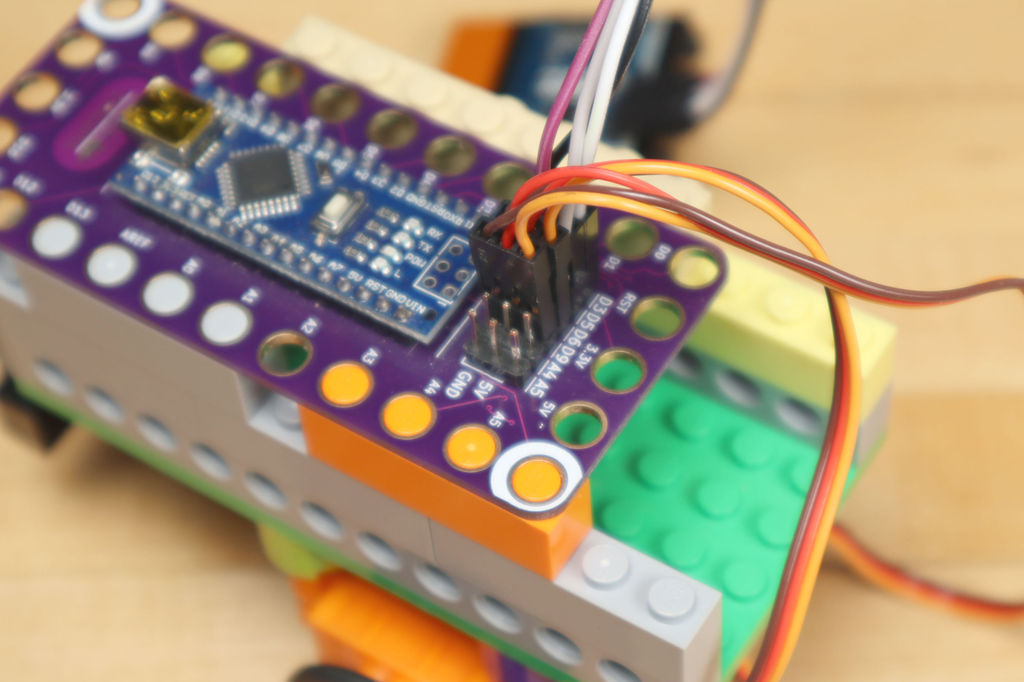
ثم تحتاج إلى توصيل كل من المحركات. من السهل القيام بذلك - الأسلاك البنية إلى GND والأسلاك الحمراء إلى 5 فولت والأسلاك البرتقالية إلى D6 للمحرك الأيسر و D9 للجهة اليمنى.
الخطوة 6: برمجة مجلس الروبوتات
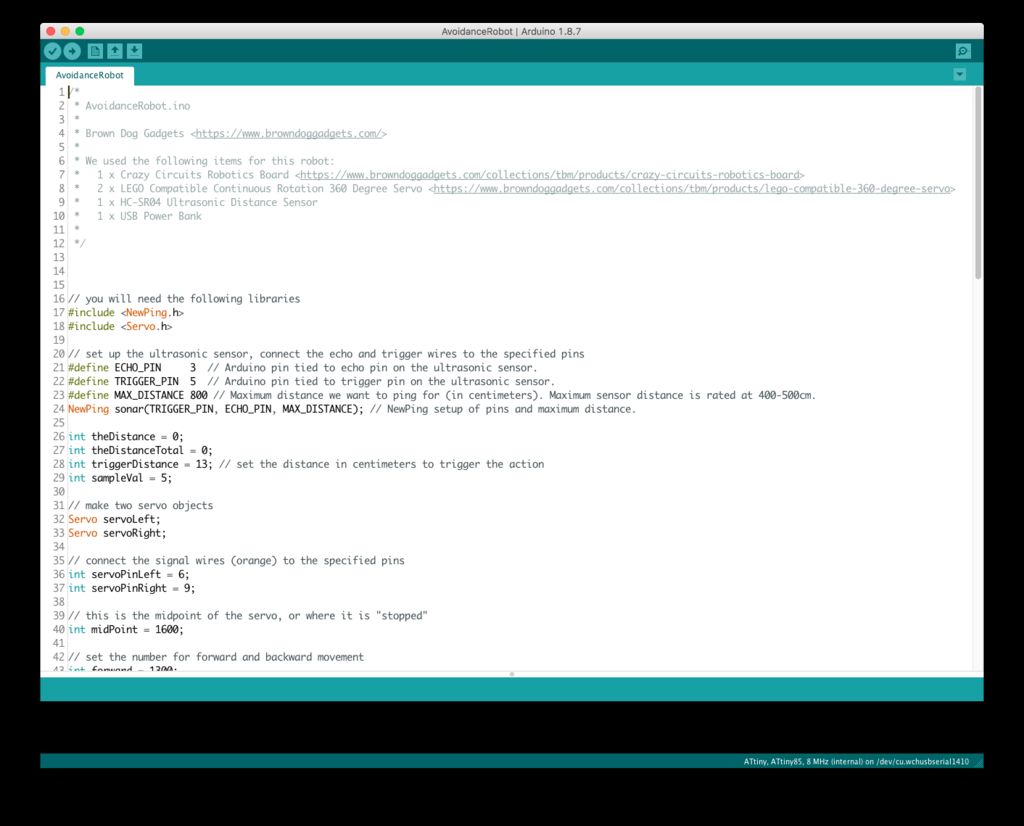
قبل أن يعمل الروبوت ، يجب تحميل الكود في وحدة التحكم الدقيقة. قبل القيام بذلك ، تأكد من تثبيت أحدث إصدار من Arduino IDE على جهاز الكمبيوتر الخاص بك .
لقد قمنا بتحميل الكود الخاص بنا إلى المستودع على GitHub:
github.com/BrownDogGadgets/CrazyCircuits/tree/master/Projects/Avoidance٪20Robot
الكود بسيط ، هناك العديد من التعليقات فيه بحيث يكون من الواضح ما هو المسؤول عن ماذا.
ستحتاج أيضًا إلى مكتبة
NewPing bitbucket.org/teckel12/arduino-new-ping/wiki/Home
الخطوة 7: دع الروبوت يمشي
بعد إنشاء روبوت وتحميل الكود فيه ، يمكنك المتابعة إلى الاختبارات!
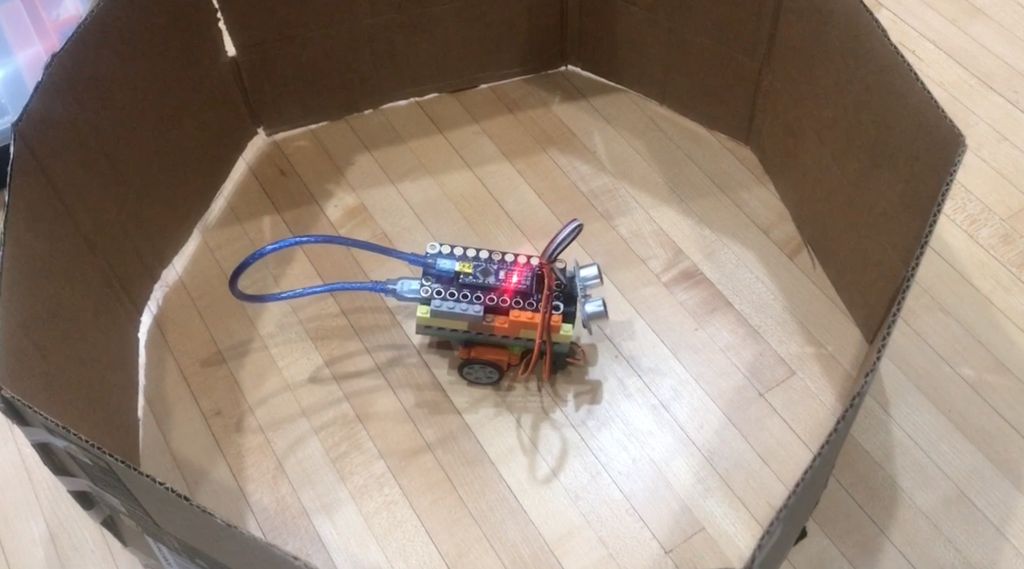
أسهل طريقة هي توصيل مصدر طاقة خارجي وإعطاء الروبوت القدرة على المضي قدمًا. إذا وضعت يدك أمامه ، فعليه أن يتحرك للخلف ، ويستدير ويمضي قدمًا مرة أخرى (تأكد من أنه لا يتحرك عن الطاولة!)
لقد بنينا "ساحة" سداسية بسيطة من الورق المقوى بحيث يكون للروبوت مكان لركوبه. لا تخف من تجربة ما لديك.
الخطوة 8: مزيد من التطوير
إذا كنت مهتمًا بتطوير هذا المشروع ، فإليك الأسئلة لك:
- ما الذي تعلمته أثناء تجميع الروبوت؟
- ما الذي أثر في اختيارك للأجزاء؟
- هل يتحرك الروبوت أسرع إذا زادت عجلاته؟
يوجد متغيرين في الكود ، تصحيحهما ، سوف تقوم بتغيير وقت رجوع الروبوت إلى الوراء عند اكتشاف عائق ، والوقت الذي سيتحول فيه. حاول تبديل goBackwardTime و turnRightTime وشاهد كيف يؤثر ذلك على سلوك الروبوت.
//
int goBackwardTime = 1000;
//
int turnRightTime = 1000;أنظر أيضا: