UAVCAN هو بروتوكول مفتوح وخفيف الوزن لشبكة الهاتف المحمول على متن الطائرة. في الآونة الأخيرة مطورها وصيانتها Pavel Kirienkoتجسستحدث عن البروتوكول في PX4 Developer Summit ، وهو مؤتمر رئيسي لمجتمع الطائرات بدون طيار باستخدام النظام البيئي مفتوح المصدر حول الطيار الآلي PX4 ، والذي تعد UAVCAN جزءًا منه. كما أعد بافيل مقالاً مفصلاً للمجتمع الناطق بالروسية عن حبري في أعقاب تقريره.
في هذا المقال ، سأتحدث عن الجانب العملي لاستخدام البروتوكول من وجهة نظر مطوري أنظمة التحكم الآلي للطائرات بدون طيار: كيف اخترنا UAVCAN ، وماذا نفعل بها وما هي الفرص التي نراها في المستقبل.

الطائرات بدون طيار الهجينة
طائرة الإقلاع والهبوط العمودي (VTOL) عبارة عن هجين من مروحية وطائرة يمكن أن تدوم أطول من المروحية بسبب الرفع الديناميكي الهوائي للجناح ولا تتطلب مدرجًا أو جهاز إطلاق ومظلة مثل الطائرات التقليدية بدون طيار. أصبح تطوير هذه الأجهزة الآن اتجاهًا شائعًا وواعدًا. يمكن استخدام هذا الجهاز للتسليم ورسم الخرائط والمراقبة وأغراض أخرى. تعتمد معظم مشاريع سيارات الأجرة الطائرة على نفس مبدأ التصميم ، على سبيل المثال:
- تاكسي هوائي كهربائي بالكامل Lilium Jet من شركة Lilium الألمانية ؛
- طائرة Heaviside الكهربائية منخفضة الضوضاء لشركة Kitty Hawk من قبل Sebastian Trun (الذي يعرفه الكثير من المركبات غير المأهولة) ؛
- مشروع فاهانا ايرباص.

طائرة إقلاع وهبوط عمودية تابعة لجامعة إنوبوليس
لقد طورنا ثلاثة نماذج من المركبات الجوية الصغيرة غير المأهولة ذات الأجنحة المختلفة والحمولة الصافية ومصادر الطاقة - جميعها كهربائية ومحركات احتراق داخلي. نتعاون مع معهد قازان للطيران ومؤسسات الطيران في قازان في تصميمات الطائرات ، وينصب تركيز عملنا على الإلكترونيات والخوارزميات والتحكم الآلي.
ما علاقة الطائرات بدون طيار بها؟
بالنسبة لأولئك الذين يعملون في مجال الطائرات بدون طيار ، يبدو هيكل التحكم النموذجي كما يلي:
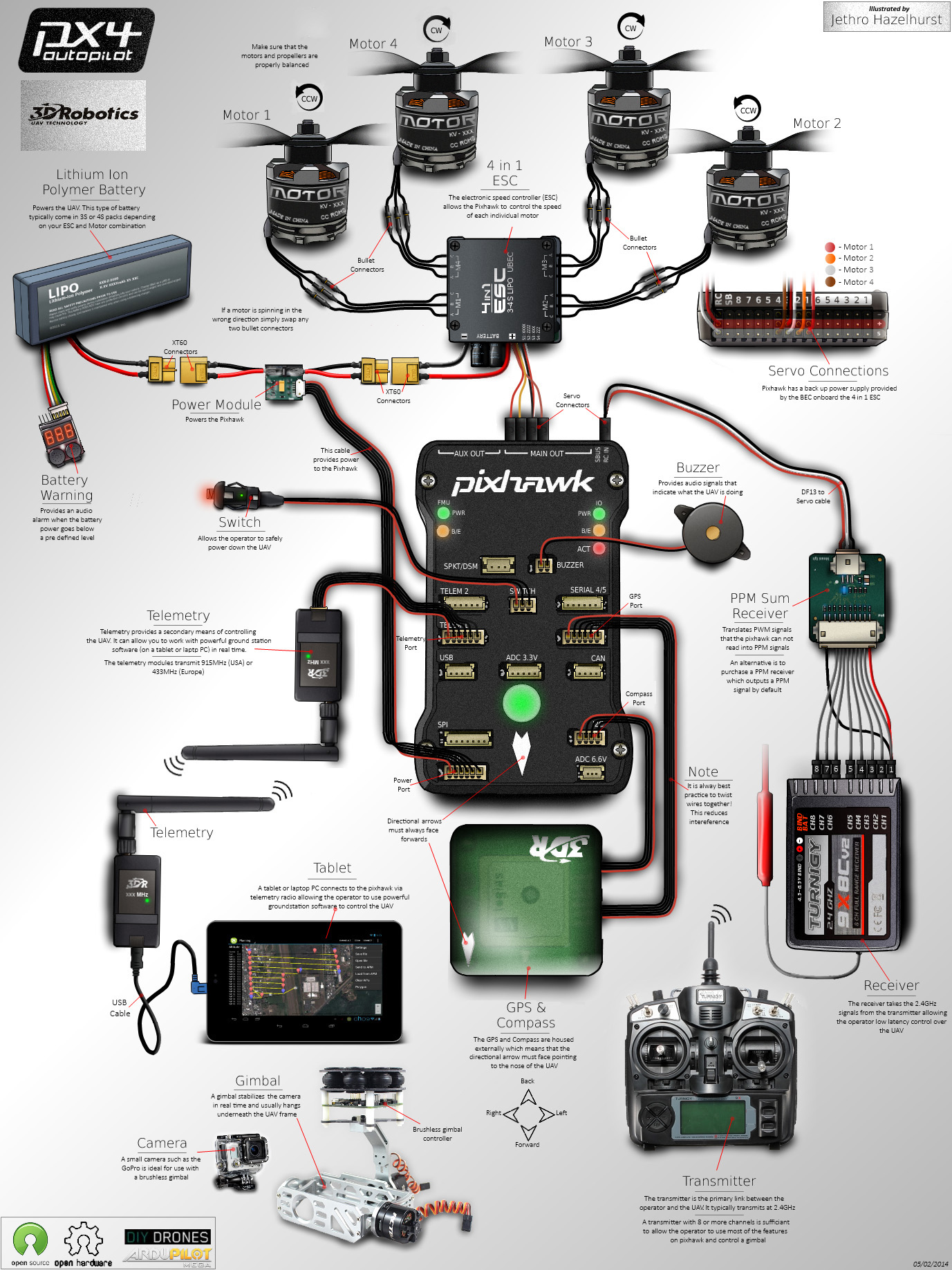
تخطيط نموذجي للطائرات بدون طيار يعتمد على الطيار الآلي PX4. المصدر
يتم التحكم في المحركات بواسطة وحدات التحكم في السرعة (ESC) ، والتي يتم توفير نقاط الضبط من الطيار الآلي عبر إشارات PWM. تتصل المستشعرات عبر مجموعة من الواجهات المختلفة - UART و I2C و SPI. بالإضافة إلى القياس عن بعد ، والتحكم عن بعد ، وإمدادات الطاقة - وستحصل على مثل هذا "العنكبوت" من الأسلاك. لكن هذه ليست المشكلة الرئيسية.
فكلما طالت الأسلاك ، أي كلما زاد حجم الجهاز ، زادت قابلية هذه الدائرة لعمليات الالتقاط. كان علينا التفكير في هذا من البداية ، لأن طائرتنا لها جناحيها 2 و 4 أمتار ، وهذا ليس الحد الأقصى.
في السابق ، بالنسبة لمشروع منطاد بطول 40 مترًا ، عملنا مع CAN (فقط كان البروتوكول يعتمد على CANOpen). وكان قرار استخدام UAVCAN أمرًا طبيعيًا بالنسبة لنا: PX4 تحظى بالفعل بدعمها ، حتى أنه لم يكن هناك خلافات في الفريق حول هذا الأمر. في البداية ، أردنا استبدال خطوط PWM الطويلة بواجهة رقمية من أجل توسيع نطاق حلولنا للطائرات ذات الأجنحة المختلفة.
اتضح أن الطائرات بدون طيار ليست قادرة على الطائرات بدون طيار
من خلال استبدال روابط PWM بروابط UAVCAN ، توقفنا عن القلق بشأن الأسلاك الطويلة ومشكلات الضوضاء ، كما قللنا بشكل كبير من عدد الاتصالات إلى الطيار الآلي.
كان هناك خياران لكيفية القيام بذلك. الأول هو استخدام حكام المحركات ومحركات الأقراص المؤازرة مع واجهة UAVCAN. هذا ، على سبيل المثال ، في Zubax . والثاني هو صنع محولات الطائرات بدون طيار التي يتم تثبيتها مباشرة بجوار ESC. اخترنا الخيار الثاني ، لأن اختيار ESC بواجهة UAVCAN صغير. في البداية استخدمنا محولات مشروع UAVCAN for Hobbyists ( UC4H ) ، ثم قررنا أن نصنع أجهزتنا الخاصة مع محول DC-DC مدمج ، ودوائرنا الخاصة ، والبرامج الثابتة ، والثنائيات المملة.
أجهزتنا مع واجهة UAVCAN
حصلت على الذوق
ثم أدركنا أنه بدلاً من عشرات الأسلاك ، يمكننا استخدام ناقل UAVCAN للتفاعل ليس فقط مع المشغلات ، ولكن أيضًا مع معظم الأجهزة الخارجية. كما أن لها تأثيرًا جيدًا على عزل اهتزاز وحدة التحكم المثبتة على منصة خاصة. نتيجة لذلك ، قمنا بتطوير عدد من الأجهزة لاستخدامنا الخاص ، ولكننا الآن نرى أنها مثيرة للاهتمام للآخرين:
- محول CAN-PWM يصل إلى 4 قنوات: الجهاز متصل بحافلة CAN ، ويستقبل ويعالج إشارات التحكم ، ومخرجات PWM. يمكنك تشغيل اللوحة مباشرة من البطارية حتى 60 فولت ، وهي تتضمن محول DC-DC الذي يوفر للوحة والمستهلك بجهد 5 فولت (3 أ) (على سبيل المثال ، جهاز مؤازر) ؛
- GPS / مقياس المغناطيسية / بارومتر ؛
- , Power Management Unit (PMU): ( ). . — , DC-DC . 1000 . CAN ;
- ;
- ;
- ;
من الناحية الفنية ، تعتمد هذه الأجهزة على متحكم STM32. نصمم أنفسنا ، ونطلب الإنتاج في pcbway. يتم تنفيذ البرنامج الثابت باستخدام libcanard .
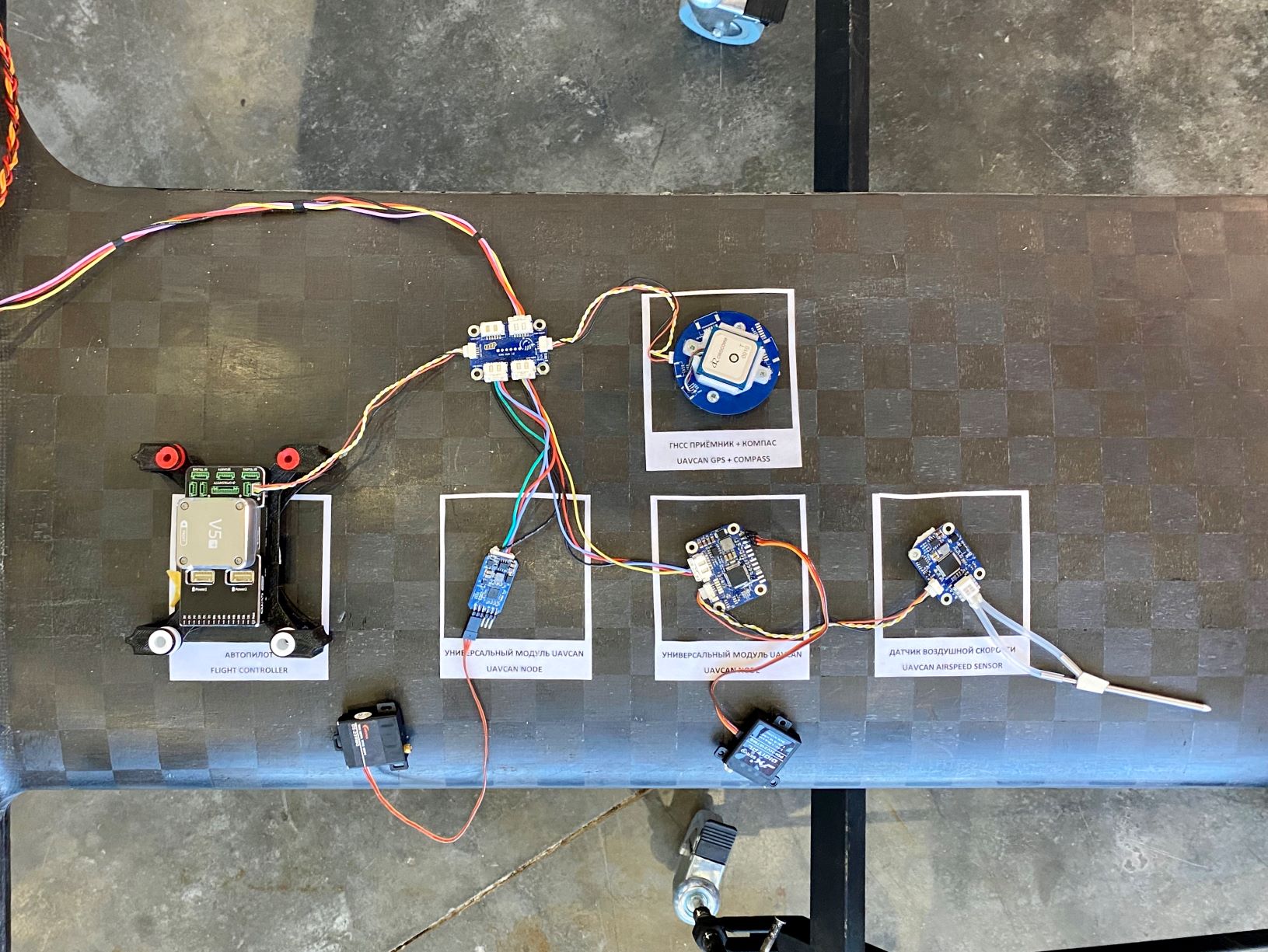
شعورنا بالعمل مع UAVCAN هو عتبة دخول منخفضة إلى حد ما. استغرق الموظف الجديد أقل من أسبوع لمعرفة وبرمجة مستشعر المسافة على جانبي الطيار الآلي STM32 و PX4.

نختبر أجهزة جديدة على طائرة صغيرة بدون طيار مظلمة
ثم نستخدمها على متن طائرة:
فيديو قصير لرحلة تجريبية لطائرة VTOL الخاصة بنا في جميع الأوضاع
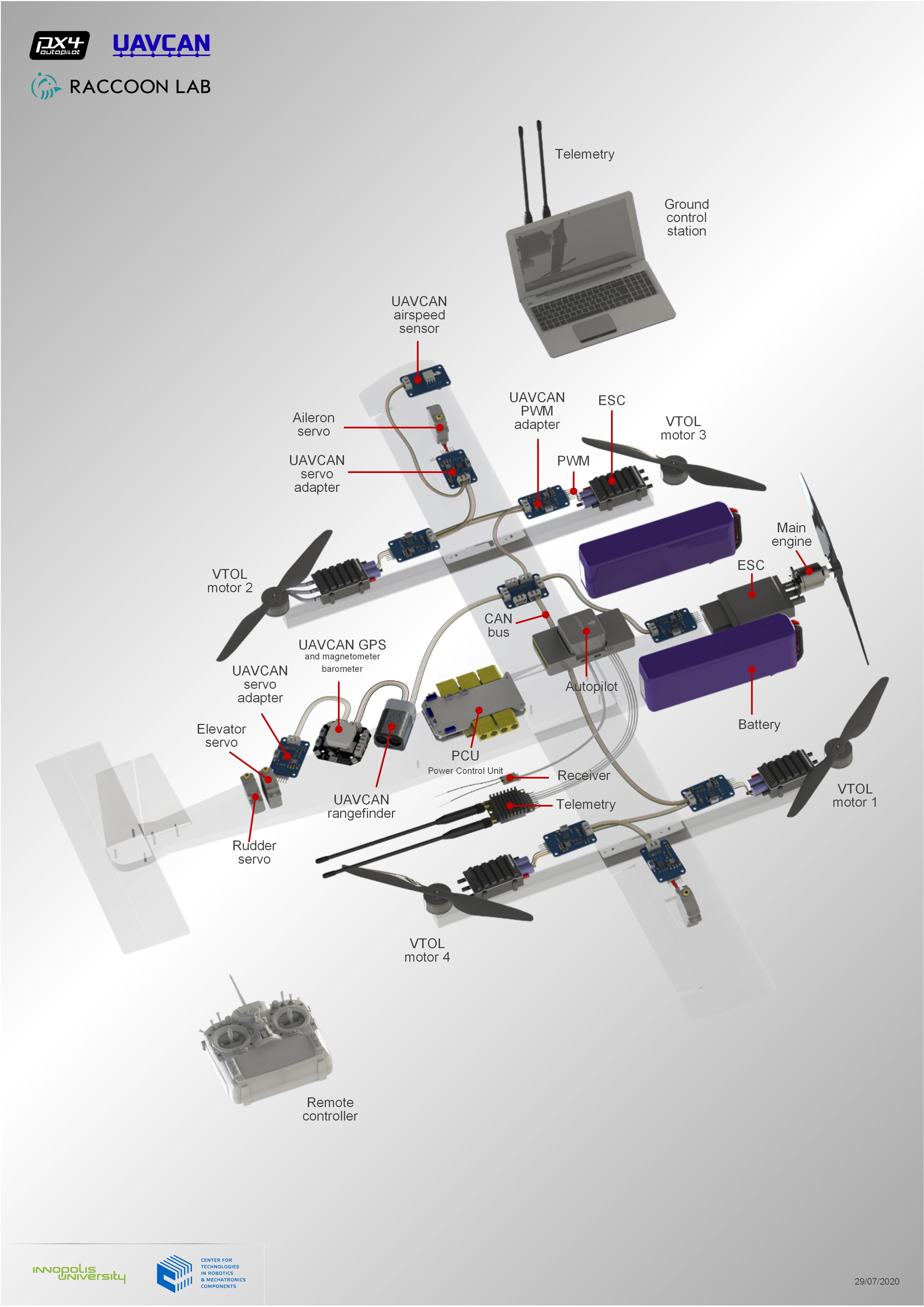
نتيجة لذلك ، يبدو مخططنا كما يلي: مخطط لطائرة VTOL الخاصة بنا باستخدام أجهزة استشعار ومشغلات UAVCAN
ما هي المزايا التي ستوفرها لنا الطائرات بدون طيار في المستقبل
حجز
أهم مهمة في تنفيذ منتج يعتمد على طائرة بدون طيار هي ضمان الموثوقية. لقد بدأنا بالفعل العمل على هذا. على سبيل المثال ، يمكن توصيل العديد من مستشعرات GPS والسرعة الجوية واستخدامها بشكل متوازٍ. ولكن لا يزال هناك الكثير مما يجب عمله. على الأرجح ، سيتم تسهيل نسخ أجهزة الاستشعار ووحدات التحكم باستخدام ناقل CAN. يمكنك توصيل حافلتين بـ Pixhawk ، وترك عدة أجهزة استشعار متطابقة في الحافلة للتكرار.
تحجيم
في المستقبل ، نريد تصنيع مركبات كبيرة يزيد وزن إقلاعها عن 30 كجم ، على الرغم من صعوبة التصديق على ذلك. تتيح لك قابلية التوسع في البنية القائمة على UAVCAN وضع خطط طموحة.
محاكاة HIL حقيقية
الآن موضوع تشغيل الطائرات بدون طيار في البيئة الحضرية يتطور بنشاط - التنقل الجوي الحضري (UAM). لتنفيذ مهام UAM ، تحتاج إلى الاعتماد أكثر على أجهزة الاستشعار مثل الكاميرات والليدار. هنا يصبح من الضروري تطوير وتصحيح أنظمة التحكم الذكية ، وكذلك لزيادة موثوقيتها. لهذه الأغراض ، يقوم فريق آخر من جامعة إنوبوليس بتطوير Innopolis Simulator للأجسام المتحركة المستقلة بناءً على Unity 3D للاختبار وتصحيح الأخطاء والتدريب. Innopolis Simulator بالنسبة لطائرات VTOL الخاصة بنا ، نستخدم Innopolis Simulator جنبًا إلى جنب مع Gazebo للمحاكاة الواقعية ، واختبار التحكم ومعالجة بيانات المستشعر - lidars والكاميرات.

نحن نعمل الآن على وحدة محاكاة الديناميكيات الخاصة بنا بدلاً من Gazebo مع ديناميكيات هوائية أكثر دقة ، وكذلك على ميزة أخرى - محاكاة HIL حقيقية (من الأجهزة الموجودة في الحلقة ، أو محاكاة البرامج والأجهزة ، PAM).
في حلنا ، تأتي جميع البيانات من المستشعرات ، ويتم إرسال عناصر التحكم إلى المحركات وأجهزة الماكينة عبر ناقل UAVCAN. لماذا لا تصنع وحدة لمحاكاة هذه المستشعرات على نفس مستوى الناقل؟ بدلاً من الأجهزة ، نقوم ببساطة بتوصيل جهاز كمبيوتر بجهاز محاكاة بجهاز التحكم.
الآن يتم HIL المحاكاة في PX4 باستخدام HIL_ خاص * رسائل MAVLINK (بروتوكول القياس عن بعد، ويعمل على منفذ تسلسلي أو UDP / TCP)، التي تحاكي أجهزة الاستشعار والمحركات.
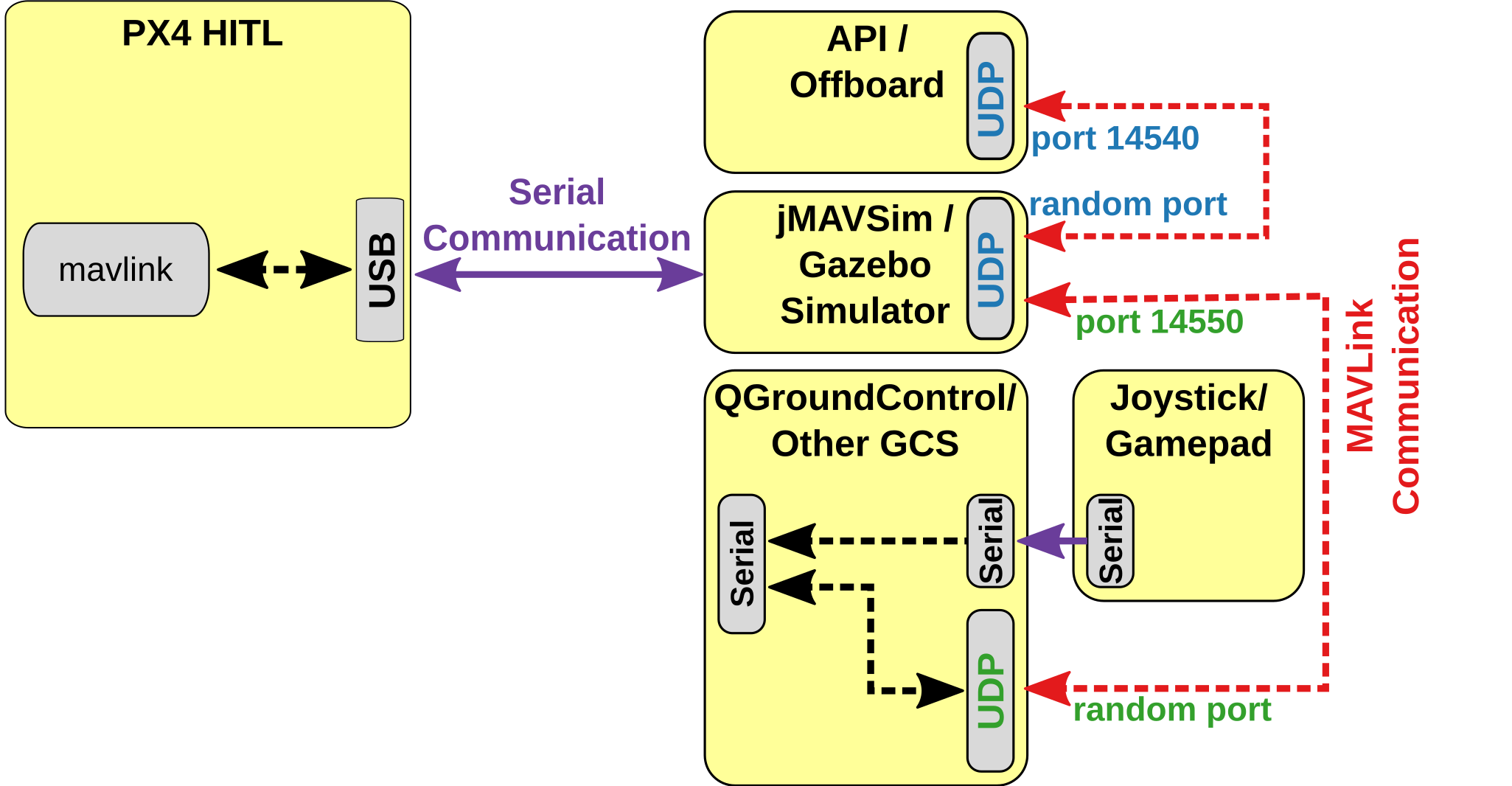
رسم تخطيطي لعملية PX4 في وضع HITL.
محاكاة المصدر ، كما يتم تنفيذها حاليًا في PX4 ، هي طريقة تشغيل منفصلة لوحدة التحكم في الطيران ، تختلف عن تكوين الرحلة "القتالية". نحن نحاكي رسائل الطائرات بدون طيار مباشرة ، من الناحية المثالية ، قد لا يعرف الطيار الآلي ما الذي يعمل في بيئة المحاكاة. لكن يجب أن أقول إن مشكلة محاكاة وحدات IMU الموجودة داخل الطيار الآلي وغير المتصلة عبر CAN لم يتم حلها من الناحية المفاهيمية. المخطط المقترح لعملية PX4 في وضع HITL باستخدام UAVCAN يزيد هذا الحل من موثوقية نتائج تصحيح الأخطاء على جهاز المحاكاة ، بحيث يمكنك الانتقال بأمان أكبر إلى اختبارات الطيران. محاكاة الطيران HIL. المصدر نهج مشابه ، عندما يتم محاكاة الأجهزة على مستوى الواجهة ،
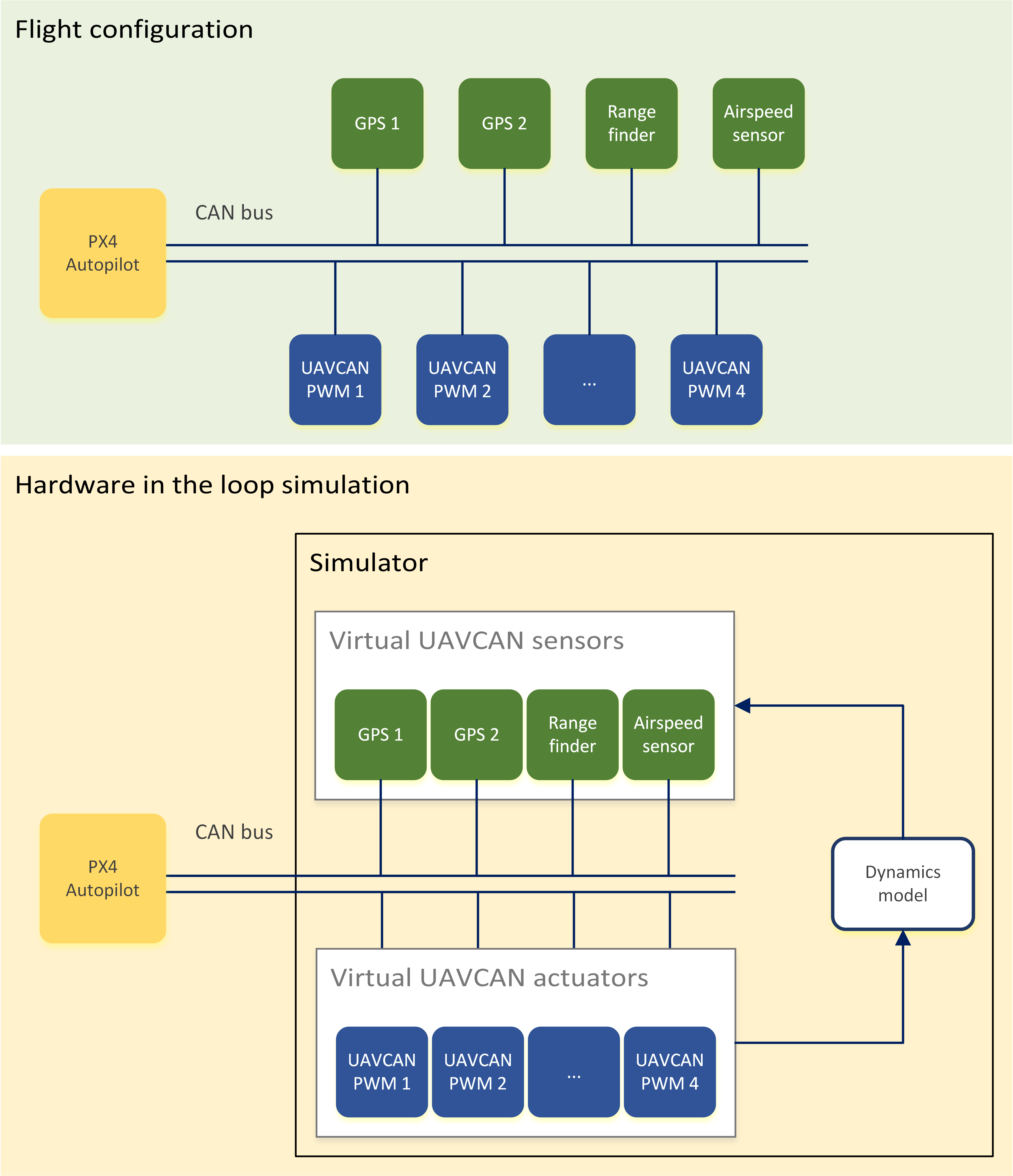

تستخدم في الطيران الكبير ، ولكن مع الطائرات بدون طيار نجعلها أكثر سهولة وسهولة.
انتاج |
إنه لأمر رائع أن قضايا الخفة والموثوقية و "الوقت الفعلي" لبروتوكول UAVCAN قد تم التفكير فيها بالفعل بالنسبة لنا ، وكذلك ماهية PX4 و ROS و Linux في النهاية. سيكون من الصعب علينا أن نصنع مروحياتنا وطائراتنا وأنظمة التحكم والمخططين إذا لم يكن كل هذا موجودًا.
يتيح توحيد البروتوكولات والبرامج للمطورين التحدث بنفس اللغة. في الوقت نفسه ، ليس التوحيد فقط مهمًا ، ولكن أيضًا إمكانية الوصول ، والتي توفر إلى درجة عالية نهجًا مفتوح المصدر. وهذا يسمح ، بالوقوف على أكتاف العمالقة ، بالانتقال بسرعة إلى مهامهم ، بدلاً من بناء "بنية تحتية" طويلة للعمل ، والتي آمل أن نكون قد أظهرناها بمثالنا في هذه المقالة.

نشرب مشروبات باردة بعد رحلات ناجحة